

Understanding Different Types Of Manoeuvres of a Vessel
Before venturing deeper into our topic of discussion, let us first understand what the term ‘manoeuvrability’ of a ship means.
Manoeuvrability is defined as the inherent ability of a vessel to change its course/path.
Understanding the factor of manoeuvrability of a vessel is extremely important to a designer or a seafarer, along with other aspects such as structural design, machinery, propulsion, stability and seakeeping.
As a ship has to endure long voyages through different weather conditions, it is important that the performance of a vessel during the day-to-day instances of its voyage are not compromised on:
- Turning about an obstruction such as landmass or any other marine vehicle
- Circling about a desired point of interest
- Surging, stopping and accelerating
- For maintaining/varying its course or direction
- To maintain a desired path/trajectory
- To promptly veer about an object (ship, iceberg, landmass, reef etc.) without costing much in time
In fact, various types of manoeuvres a ship needs to execute may be plentiful and enlisting all of them will be difficult. Needless to say, manoeuvring is an important pastureland in the field of marine design and analysis of vessel performance post-design.

Now the question arises, is turning or stopping a ship similar to that of a car? The answer is a very big NO. Unlike cars or other modes of land transport, one of the biggest problems in manoeuvring marine vehicles like ships is the hydrodynamic water-body interaction that takes place. This makes the problems of motion and control complicated.
Let us try to understand this with an example. Suppose you’re driving a car and need to stop hastily. You apply the brakes and in a few seconds, the car comes to a dead stop. Or in another case you are required to make a quick swerve while driving on a hilly road. You promptly tilt the steering wheel and the car takes up the desired path almost instantaneously.
Unfortunately, this is not possible with ships. Firstly, because unlike cars, ships do not run on solid surfaces and hence cannot have brakes. Secondly, the forces that act on a car are entirely different from the hydrodynamics of the surrounding fluid that acts on the ship’s large inertial mass (which doesn’t allow it to be as responsive as the car).
Hence, prediction of motion controllability in the case of a ship is a tedious job not only at design/construction stage, but also at the operational stage.
Definitive Manoeuvres
Rudders and various other control surfaces are provided to control the motion of a ship at sea. A good manoeuvre requires a proper hydrodynamic interaction between the control surface and the ship structure as a whole.
Control surfaces such as rudders, therefore, are the external means of aiding manoeuvrability through interaction with the hydrodynamic parameters associated with the vessel.
Also, it is essential to note that all kinds of manoeuvres are triggered off by the application of rudder force in some specific direction.
Right after the launch, a ship undergoes all the necessary trials under certain predefined conditions to assess these manoeuvring abilities.
IMO has its own set of rules slated for conducting each of these manoeuvring trials for optimising the maximum feasible limits with the best performance of the vessel.
What are Manoeuvring Trials?
Just as all other aspects of the ship namely engine, ballast, cargo handling, etc. need to undergo trials, the vessel’s manoeuvrability aspects are also tested to ensure that it can safely navigate under worst-case scenarios.
Based on the possible manoeuvres the vessel can have, a certain set of trials are conducted for each form of manoeuvre. The results in the form of dynamic variables are then compared with the pre-defined standards.

These sea trials help in acquiring the entire data output of the vessel eliminating the scaling complexities of a model. Moreover, in case flaws are detected during trials, they can be rectified right away without any uncertainty, prior to the delivery of the ship.
However, there are certain drawbacks of conducting vessel trials and the results received from the same. They can be enlisted as:
- Environmental vagaries can disrupt the trials and yield inaccurate results
- They are costly
- They are time-consuming and cumbersome
- As trials need to be performed in wide open seas, most often, the vessels have to travel a long distance from their place of launch.
Before conducting manoeuvring trials, for accurate results, it is essential to ensure that the conditions are congenial for a trial and are in accordance with the required standards.
- Deep and unrestricted waters: As per IMO criteria, the depth of the water should be more than 4 times the draft at midship. Moreover, it should be done in a place isolated from other ship traffic and far from any landmass.
- Calm Sea Conditions: The prevalent weather in that region must be suitable for the trial to be conducted. The Sea State value must be strictly less than 4 and the wind speed should be within Beaufort Scale 5. It goes without saying that all trials should be cancelled in case of harsh weather conditions such as storm, cyclones, rainfall, snowfall etc.
- Away from Tidal Influence: All trials should be conducted in areas where there is lesser influence of tides, currents, swells and even high waves.
- Proper draft, even keel and no trim in the proposed loading conditions.
- Steady Approach: Before taking a trial, the vessel must be allowed to run on a steady course for some time. This is done in order to monitor the propulsion and machinery systems of the ship and to stabilise the driving machinery. According to IMO norms, the slated approach speed should not be less than 90% of the speed corresponding to 85% MCR (Maximum Continuous Rating) of the main engine.
Some of the common manoeuvring sea trials a ship is put through are:
- Turning Circle Manoeuvre (for medium/large size vessels, mainly)
- Collision Avoidance (Small, non-displacement)
- Zig-zag Test
- Spiral and Reverse Spiral Test
- Pull-out Test (all kinds of general-purpose vessels with a rudder)
- Stopping Test (including Crash Stop) which of course has nothing to do with course-keeping/manoeuvrability but is a necessary speed trial carried out in tandem to with all the previous ones to characterise its stopping ability.
TURNING CIRCLE MANOEUVRE
This is the most common manoeuvre a vessel may be required to do every now and then. Let us take some instances such as making a swerve around a landmass ( island, port, harbour, other vessels), taxing/berthing for cargo handling, making its way through a canal or heading back to its original destination after encompassing its destination. Turning is inevitable in ships.
The ‘Turning Circle Manoeuvre’ can be explained briefly as:
- First, it is ensured that the vessel is heading forwards in a straight line with a steady approach speed
- Then rudder is turned in the specific direction, i.e. for starboard turn rudder is turned towards starboard side
- For best achievable performance, maximum rudder angle applied is 35 degrees within design limits (as exceeding that would gradually lead to less-efficient lift and finally stall).
- The ship initially has a tendency to deflect towards the port. Then it takes a large turn to starboard.
- After sometime, it makes a complete turnaround (like a U-turn of a car) with an 180-degree change in heading direction.
- After some time it takes the trajectory of a circle with a Steady Turning Radius.
- The turning circle has to be done both ways, i.e. port and starboard by deflecting the rudder to the same extent both ways
Though this may seem quite simple, it has a whole lot of hydrodynamic interaction involved. Pertaining to which, the turning may be segregated into 3 different phases:
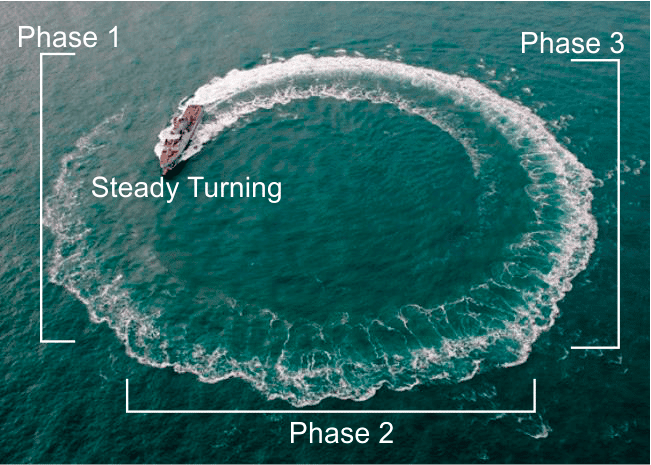
PHASE 1:
This is when the rudder force is first applied whilst the ship is originally surging in a definite straight line without any ‘yaw’ (rotatory motion about the z-axis). Moreover, due to the absence of any transverse forces and moments, both the ‘sway’ (side-to-side or port-starboard motion) and ‘yaw’ velocities are considered zero. However, due to the application of the rudder angle, some forces and moments are induced in the transverse direction. This gets aggravated by the interplay of the hydrodynamic factors.
One important question might be arising in your mind; why is that for a starboard turning phase, the ship drifts to port for some time before finally reverting to starboard? This is because, after the application of a rudder angle, the rudder creates some force on the starboard side. This force is reciprocated by the hydrodynamic force as an equal and opposite reaction force on the port side. As other forces arising due to the hull are absent during this phase, the ship tends to drift sideways to port!
When the forces come in equilibrium, the ship again makes a starboard turn.
PHASE 2:
In this phase, the ship is about to make a complete 90-degree change of heading from its initial path of heading. The moment induced by the hull gains some predominance by this time, thanks to the increasing drift angle caused by the rudder moment. After some time, the rudder moment balances the hull moment. At the second phase, not all angular and linear velocities and accelerations are equal to zero.
One more interesting phenomenon that takes place in a turning circle is the effect of the centrifugal force that acts on the ship .The physics involved here is quite simple: any body undergoing a revolution has an additional centrifugal force that acts from the geometric centre of the circle it traces.
PHASE 3:
As the rudder is kept a constant deflection, the ship continues to trace a circle. In the third phase, the hull moment exceeds the moment induced by the rudder and the ship reaches a Steady state of Turning. The angular and linear velocities remain constant as the ship turns in a circle of constant radius. As all external influences are diminished, the acceleration parameters become zero. The centrifugal force continues to act on the ship.
The ship will continue to circle along the same trajectory if the rudder is not brought back to its mean position.
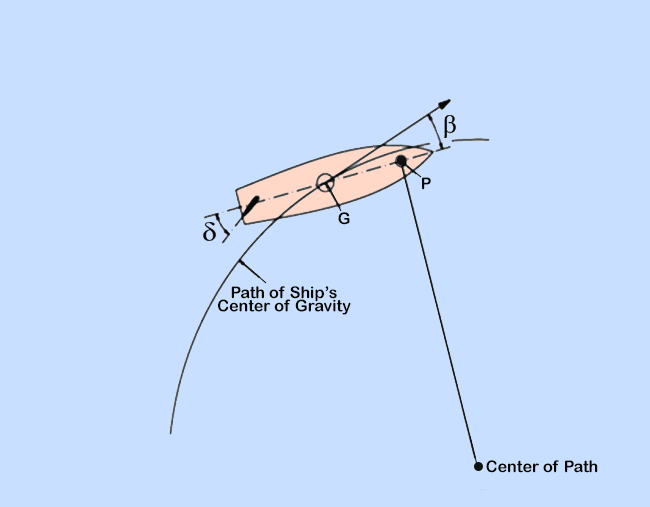
In all of its three phases, the ship apparently tends to move about some fixed point. This is due to the relative frame effects of motion. This fixed point about which the ship appears to be rotating even when it is revolving is called the Pivot Point. This point is a subject of special interest as it is the point at which the drift angle is zero. At any point, all forces and moments are in. In general cases, the pivot point lies between one-sixth and one-third of the ship’s length from the bow.
The aim of performing this trial is to test the ship’s overall ‘Turning Ability’ as it comprises an indispensable manoeuvre that a ship has to undergo every now and then. Following are some of the outcomes that are chiefly recorded and assessed while conducting this trial:
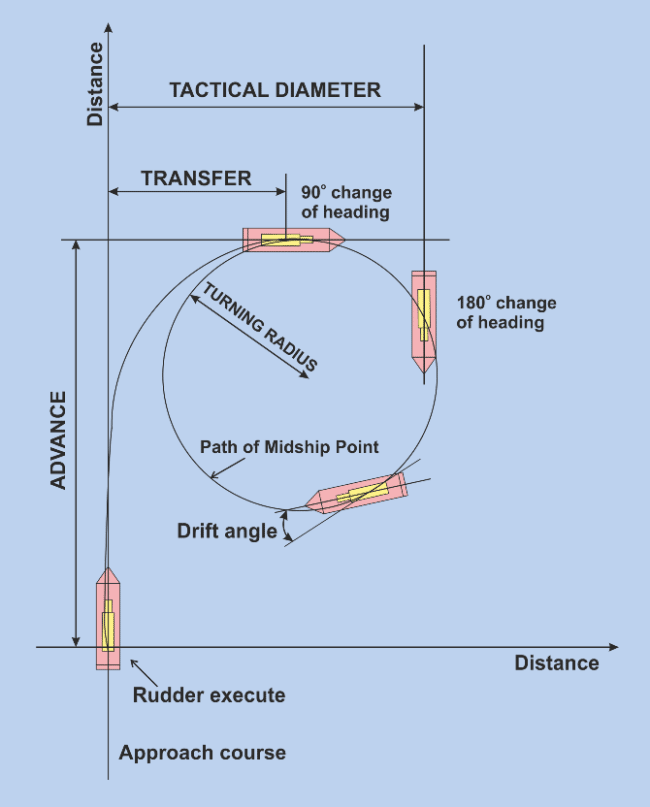
- Advance: Advance is the distance surged by the ship forward after the rudder angle is applied. As mentioned earlier, a ship has to manifest all the hydrodynamic effects associated with it while performing any change in its motion. Unlike a car, it can’t just turn right-away after the rudder deviation is applied. After traversing some distance, it gradually does so. However, proper sea-handling characteristics demand faster response to an operator order. Though no hard and fast rules exist, for a given ship type and speed, a minimal advance criteria is sought, always.
- Transfer: It is the transverse distance travelled while a ship makes a 90-degree change in heading. More definitely, it is the distance between the original direction vector of the ship and the point when it has completely headed starboard in its second phase of turn. The following figure illustrates better.
- Tactical Diameter: This is a measure of the extent of turn a vessel could have. Thus, it is measured as the distance of separation between the original direction vector of the ship at steady heading to that in the final phase of its turn when steady state is achieved, that is the ship has changed its heading by 180 degrees. In other words, the distance negotiated in a complete turnaround at a constant rudder deflection is determined by this length. As the distance is almost equal to the geometric diameter of its path, it is called Tactical Diameter.
Likewise, lowest possible tactical diameters are sought as everyone would want their ship to be well within the safest limits to avoid collisions and make manoeuvres as briskly as possible!
The same criterion is similar for cars or other road transport where at the design stage the maker ensures minimising the ‘distance to turn’ as much as possible keeping in mind the lack of space and increasing traffic densities on roads.
- Time taken to change headings by 90 degree and 180 degrees: Just as measuring advance and tactical diameter are crucial, so is the time taken to achieve so. An efficient ship should cost minimum time covering its advance and tactical diameter.
- Loss of Speed: Another crucial factor considered is the speed of the vessel at every stage of a turn. The loss in speed should only be negotiable within certain limits, otherwise, the engine propulsion dynamics should be analysed deeply.
- Final Yaw Rate: It should be kept in mind that the final yaw rate is minimum.
It should be noted that IMO has its own yardsticks for slating out the maximum allowable limits of turning ability a ship can have, failing which, the entire design is discarded and made to review. These are:
- First, the Tactical diameter has to be at most less than five times the ship length for any standard merchant ship or passenger service vessel.
Td < 5*Length of Ship
- Second, the forward advance has to be less than 4.5 times the length of the ship for any general purpose vessel.
Ad<4.5*Length of ship.
The measures are based on statistical data conducted on earlier vessels and are focussed to ensure that the ship is capable of turning well within the bounds of the situation.
Another big problem that arises while turning a ship is the problem of heel during its turn. All of you must be familiar with the concept of a motorbike tilting sideways while negotiating a curve, thanks to the centrifugal effects interplaying with the self-weight. Similarly, a ship too heels sideward while taking a turn. Sway and Yaw along with the centrifugal forces acting variedly at different instances of turn are to be blamed. As stability is a pressing issue in all ships under all conditions, this effect is unwanted. Also, impacts can be detrimental if heel is not controlled at suitable limits. Hence, allowing the maximum extent of ‘safe’ heel during a turn is also of a big concern.
In our next article, we would be having further insights into other kinds of manoeuvres pertaining to a vessel which are required in different situations. The trials for assessing them would also be highlighted.
Do you have info to share with us ? Suggest a correction

About Author
Subhodeep is a Naval Architecture and Ocean Engineering graduate. Interested in the intricacies of marine structures and goal-based design aspects, he is dedicated to sharing and propagation of common technical knowledge within this sector, which, at this very moment, requires a turnabout to flourish back to its old glory.




Latest Naval Arch Articles You Would Like:





Subscribe To Our Newsletters
By subscribing, you agree to our Privacy Policy and may receive occasional deal communications; you can unsubscribe anytime.
What is the differnce between tacticul diameter and turning radius.
Tactical diameter is a term that applies mostly to warships and describes the distance to the right or left of the ship’s original course made when the ship makes a 180 turn. It is important because warships often steam in formation and must move together. The rudder angle for the various warships to turn on their tactical diameter is called “standard rudder” and is usually 15 degrees (not used in the merchant service).
Notes on pivot point: When going astern, the pivot point moves all the way back to the rudder post. When one line goes over and is secured to the pier, the pivot point moves to the chock through which the line passes. When the anchor is down, the pivot point moves to the hawespipe.
Details of manoeuvring techniques of ships written from a pilots point of view.
Hope this book will help master deck officers and cadets and aspiring marine pilots in understanding and application of manoeuvring techniques.
https://notionpress.com/read/theory-and-practices-of-marine-pilotage
Read the article published on
https://www.marine-pilots.com/article/74304
Plz answer the question-show 5 importance differences in a vassels manouevring characteristics when it is in ballast and loaded conditionwith comperative diagram?
@Niha: Please use our forums for better discussion on such topics. – https://forums.marineinsight.com