

What Does Seakeeping Of Vessels Mean?
As they say, ‘A smooth sea never made a skilled sailor’! So, seldom are the conditions in the sea placid.
Waves of various degrees, choppiness, currents, ripples, vortices, tidal variations, inclement climatic conditions, and the oceanic surface are rife with disturbances in eclectic forms throughout.
So when it comes to ships, after main parameters like structural strength, and propulsive efficiency, designing to attain maximum feasible adeptness in response to these seagoing conditions is a big challenge in the Design Spiral.
The term ‘Seakeeping’, evident from the nomenclature itself, alludes to the performance and response of the vessel in various ensuing seagoing conditions.
While Stability is a widely discussed facet of a given vessel’s response to loading and surrounding conditions, there is more to it.
The Seakeeping ability, also known as seaworthiness, is thus a yardstick to estimate the vessel’s behavioural efficacy during sea conditions underway its voyage. When we talk of ‘efficacy’, it pinpoints precisely the motions and dynamics of the ship.
It does not consider the structural considerations, resistance and propulsion conditions, and statical stability, all of which are separate entities and comprise exclusive realms of study.
Visualization Of Vessel Motions
Rarely does a seagoing vessel remains perfectly upright and equanimous. Seakeeping deals with motions encountered by the vessel in the vertical plane only (perpendicular to the sea surface).
The three feasible degrees of motion along this plane occurring discretely or in interplay are:
(I) Roll (ii) Heave (iii) Pitch.
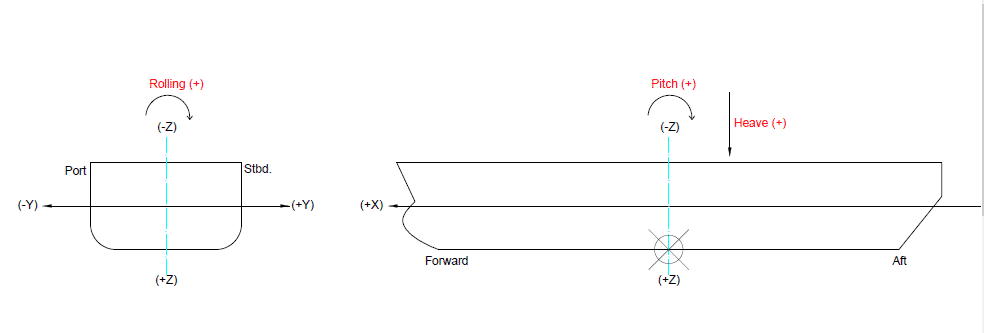
Recapitulating, Roll is the oscillatory motion of the vessel athwartships about the ship’s longitudinal axis (fore to aft). When the starboard side is down, and the port side is up, i.e., the vessel is turning in a clockwise sense when viewed from in a longitudinal direction looking forward towards the bow from aft (+X direction), the roll angle is said to be positive.
Heave is pure up and down vertical motion of the vessel concerning the sea surface. When the direction of this motion is downwards (+Z), i.e., in sinkage, the ship has a positive heave.
Pitch is the longitudinal oscillatory motion of the vessel about the transverse axis of the boat. Here the bow and stern move up and down in opposite directions (bow moving up, stern moving down and vice-versa).
When the bow moves up, i.e., upwards with respect to the sea level or in the -Z direction (and consequently the stern moves down), the pitch is said to be positive as per convention. The following figure gives the proper explanation as described.
The motions under consideration for the concurrent Horizontal plane (parallel to the sea surface) are under the purview of another domain of study, namely Manoeuvring, which is of equal importance as seakeeping.
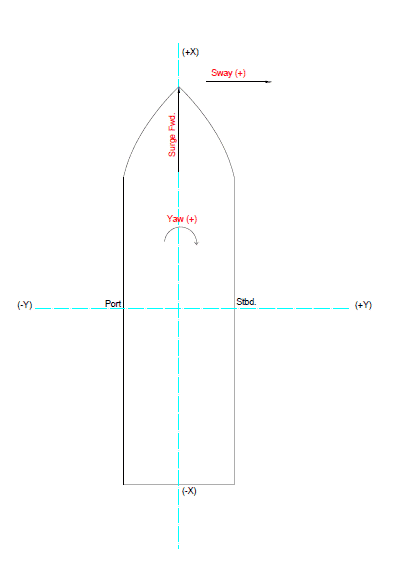
The three principal motions in this regard are (i) Surge, (ii) Sway and (iii) Yaw. Surge deals with the to and fro (forward and backward motions) of the vessel, i.e., along the X-axis of reference, the positive surge being the direction towards the bow.
Sway alludes to the sideways motion of the vessel (along the Y-axis), the directions in the way of starboard taken positively as per convention.
Yaw is the rotational motion of the vessel about the vertical axis of rotation (preferably passing through the longitudinal centroid of floatation and perpendicular to the longitudinal plane).
The bow moving towards the starboard direction of the ship, i.e., the vessel turning in a clockwise sense in the +Y direction, the yaw is considered positive and vice versa. All of these are explained in the figure below.
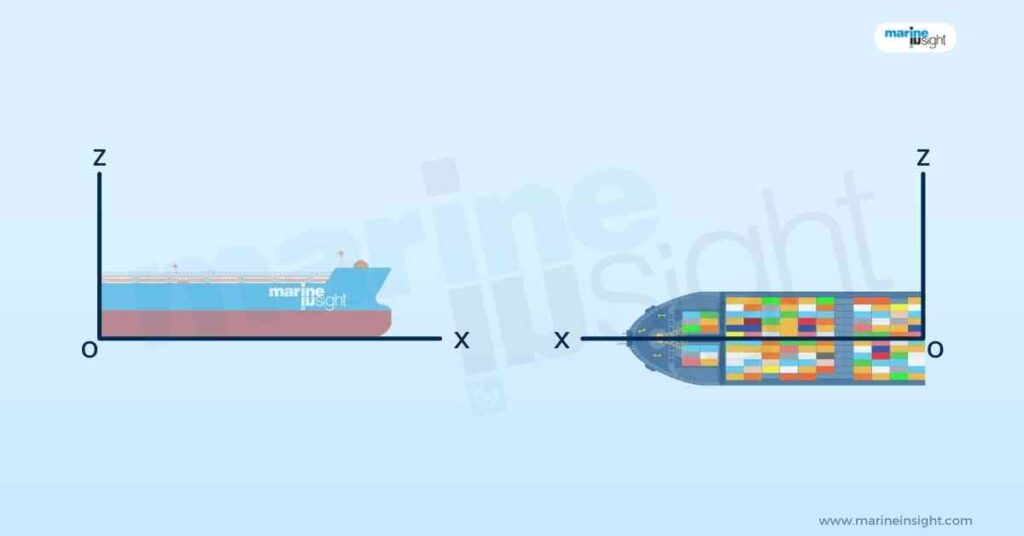
When we talk of describing Seakeeping and Manoeuvring, collectively the motions and dynamics of the vessel at sea, it is also necessary to understand the frame of visualization.
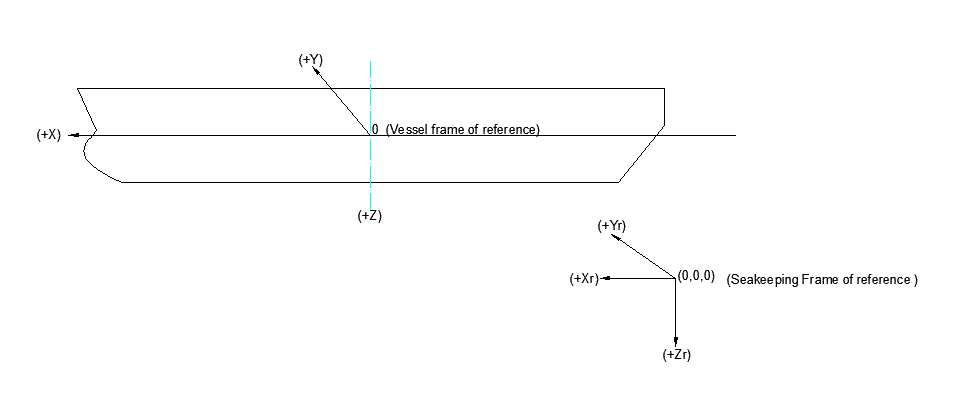
When we talk of seakeeping motions specifically, the best frame of reference for analyzing the dynamics in the vertical plane (roll, pitch and heave) is the ship-fixed-earth-relative frame or the seakeeping frame.
The best analogy can be a person or point moving alongside the vessel in a hypothetically undisturbed (no values of motion in Y or Z co-ordinates whatsoever) platform which is traversing in the same heading as the vessel, with the same forward speed and without any deviation, i.e., the observer is in a relative linearly fixed condition concerning the traversing vessel.
So, this frame of reference is said to have the seakeeping perspective in the most accurate sense, as shown.
Perception Of Seakeeping
The assessment for seakeeping and design considerations in achieving the same is centred around three main objectives or cornerstones for design:
(i) Habitability
(ii) Operability
(iii) Survivability.
Habitability involves the human factor and sustenance of cargo. It consists of the degree of passengers’ comfort and health. Erratic and irregular vessel motions can seriously affect passengers and crew regarding seasickness and other health problems like motion sickness, which could interrupt their work.
Thus, the design philosophy of a vessel encompasses this facet as an indispensable factor. This also varies from vessel to vessel based on service. A passenger or cruise ship has to imbue higher consideration of this aspect compared to cargo vessels, as evident.
Operability deals with the efficacy of the equipment, machinery and other systems onboard required for the seamless, uninterrupted operation of the vessel.
Survivability is related to the vessel’s safety, including effects that may impair the structural integrity of the crew and cargo/freight so that they don’t suffer harm or damage.
So, the effects in moderate or highly rough seas can be any or a combination of the following problems:
• Ship motions like heave, pitch and roll, as discussed before
• Global loads acting on the hull girder due to waves
• Local loads acting on various structural components
• Variant and erratic pressure profiles acting on the hull due to external conditions
• Acceleration loads acting on the vessel
• Deck wetness and green water problems due to flooding
• Bow Slamming
• Propeller emergence
• High wave resistance problems
• Machinery and engine space flooding
• Wave Slap effects in various vulnerable areas
Analysis For Seakeeping
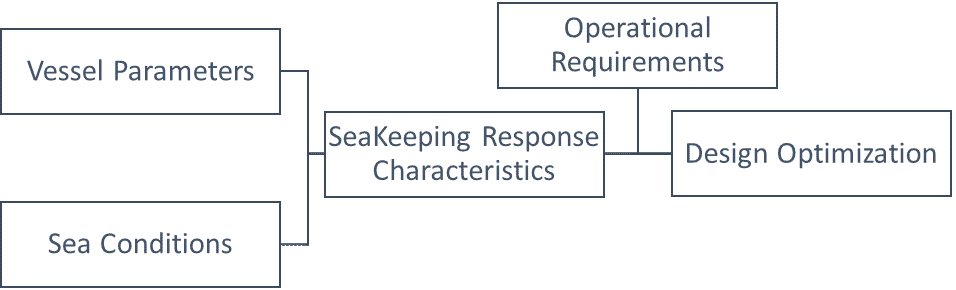
Before carrying out any form of analysis for seakeeping, the entire domain can be broadly streamlined into a 3-part problem or a system. The following schematic represents the same:

This is analogous to an electronic filter which takes the input signal, filters the signal and produces the desired output signal waves. The input signal can be visualized as the external disturbances ensuing in the sea environment, like waves encountered by the vessel.
The current sea state is a direct determinant of this input. The vessel’s characteristics or the degree of response offered by the vessel is the system that absorbs or suffers these external disturbances based on its design, type, and the kind and extent of disturbance occurring. The resultant motions of the vessel in response to this are the output.
Hence for every vessel, the designer is interested in these main aspects under consideration:
(I) Estimation and conception of all the plausible environmental conditions likely to be encountered by the vessel
(II) Feasible seakeeping response characteristics of the vessel based on the interplay of its inherent features and the likelihood and kind of the oncoming disturbances
(III) Criteria for desired seakeeping assessment of the vessel under given conditions and performance optimization without compromising on the maximum operational requirements.
The following flowchart represents the ideal representation of the entire domain of seakeeping analysis.
Assessment Of Sea And Environmental Conditions
The aggregate sea conditions relevant to that particular vessel must be considered in the first step of seakeeping analysis.
The following gives us a compelling picture of the prevailing sea conditions necessary for our analysis:
Wave Spectra: Wave spectrum or spectra is the collective set of waves under consideration consisting of random superimposed waves of various wavelengths, amplitudes and periods. All of these parameters are equally important. These give the complete real-time data of the ocean condition in theoretical terms.
Significant Wave Height: The mean of the highest 1/3rd values of available wave heights in the given spectra.
Average Wave Periods expressed as Modal Period (T0): Most frequently occurring wave period among all wave periods in the spectra
Frequencies. This is also a very crucial aspect of wave spectral analysis. High frequencies can lead to rapid motions of the vessel and vice versa in various degrees of freedom. Moreover, suppose the frequency of any particular wave motion is the same as that of the natural structural frequency of the vessel. In that case, it can cause resonance leading to heavy motions.
Variance or the total surface area under the wave spectra
RMS (Root Mean Squares) of maximum wave elevations
Wind Speed and Direction
Real-time weather data
Wave Direction and heading
Angular Spreading Function-A complex numerical multi-dimensional measure of the wave energy pattern and distribution (beyond the scope of our discussion)
Wave Spectra can be best described by the curve of wave energy dissipated or the wave spectral densities versus encountered frequencies for a particular wave profile.
Proper determination of wave spectra is a complex and challenging task. However, primarily for convenience, standardized wave spectra based on standard sea states are taken for reference.
For example, ITTC or Pierson-Moskowitz is taken for steady, fully developed seas formed over large areas, whereas JONSWAP spectra type is considered for lesser developed, less steady sea conditions.
Associated sea conditions are also modelled these days using dedicated software which simulates the conditions on a real-time scale.
The respective Sea States determine the current scenario of calmness in a certain region under consideration. The most reliable and commonly used means of choosing the sea states is by a standard scale known as Beaufort Scale.
Usually, on a scale from 0-12 (maximum), the scale indicates the intensity of the associated sea conditions in increasing order as explanatory. So, it is evident that in higher sea states, the environmental conditions are rough; thus, the corresponding parameters involved in seakeeping are adversely affected.

Vessel Parameters
The seakeeping characteristics of the vessel, other than the surrounding sea conditions, are also determined indispensably by the vessel’s parameters. From a seakeeping point of view, the following parameters are essential:
- Vessel Dimensions (Length, Breadth, Draft)
- Displacement and tonnage distribution
- Intact Stability of the vessel and necessary values for the same
- Longitudinal Centre of Buoyance and Flotation (LCB and LCF)
- The hull form and Flare
- Freeboard (and Reserve Buoyancy)
- Vessel Service Speed
- Type of Bow and Stern
- Seakeeping-specific design features like Anti-rolling (bilge keel, fins, anti-rolling tanks) or anti-pitching
- Tankage
The influence of these parameters can be varied. For example, a vessel with a lower Breath to Draft Ratio (B/T) is at a greater risk of rolling than one with a higher B/T ratio.
Similarly, a vessel with a shallow draft (T) is at a greater risk of keel emergence and resultant phenomena like slamming and pitching when in rough sea conditions.
Again, for example, during heaving, if the centre of flotation is not aligned with the centre of buoyancy below, then that can generate a coupling moment resulting in pitching. We shall discuss more of these facets later in this article.
Seakeeping Response
After determination of the nature of disturbances likely to be encountered and assessing the vessel’s inherent attributes, the next task in the design hierarchy for seakeeping is the scope for analysis of the vessel as a system in response to the same. Lastly, we couple both the above to estimate the ship’s response in terms of its dynamics.
Now the question arises, how do we carry out the prediction of the vessel’s response and quantify them to a given disturbance? The answer lies in a commonly used numerical operator known as Response Amplitude Operator (RAO).
This is a numerical transfer function used to determine how a particular sea state affects a specific motion for the given vessel.
It varies for all different types of motion along the 6 degrees of freedom and hence, is strictly dependent on the intensity and physics of the incident disturbance and, of course, the type, size and kind of vessel.
This numerical operator is thus the determinant of the output motion dynamics after passing the disturbances (input) through the vessel, which is analogous to the ‘filter’ as expatiated above.
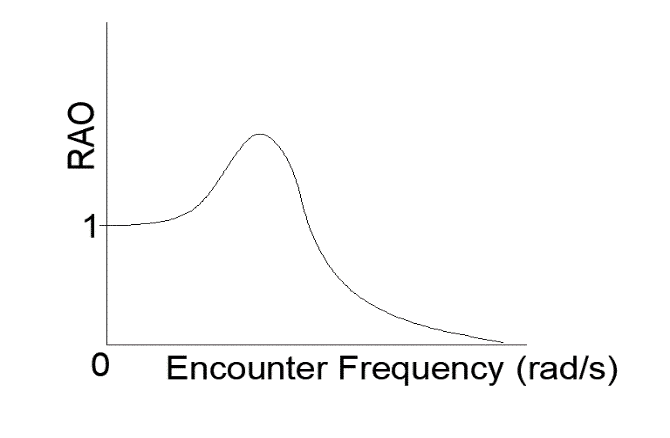
In the representative image, a sample response of a vessel (pitch, heave) regarding its RAO concerning the encounter frequency of a wave family is shown.
From the start of the curve, the vessel is unit, which is attributed to the fact that it simply ascends and descends the incident wave profile, which at the moment has a negligibly low frequency (and thus a large wavelength, which makes it conducive for the vessel to follow its shape).
However, as the wavelength increases, the frequency increases with time, and the RAO increases. The vessel goes into more excited motions.
At the peak, the encounter frequency matches with the natural frequency of the vessel, the condition of resonance, as touched some time briefly back.
Here, the RAO dramatically increases to very high values, the vessel suffering heavy motions before subsidizing again. The wave fragments into numerous smaller wavelets at very high frequencies (low wavelength).
These superimposed small wavelets negatively interfere with each other, thereby nullifying the net effect imposed on the vessel. Thus, the ship tries to become equable again, the RAO value tending to zero. So, the modulus of a vessel’s response is simply proportional to the measure of RAO.
In a mathematical sense, RAOs are complex to define and comprise several physical components and other factors, which we omit discussing here.
However, there can be several ways of determining RAOs. They can be existing vessel data, experimental data like tank tests or numerical simulations using first principles or software.
Design Philosophy And Criteria For Seakeeping And Optimization
Nothing can be changed about the natural factors which dictate the environmental conditions encountered by the vessel. So, to optimize the seakeeping response of the ship and improve its characteristics, the naval architects can only maximize the design verticals for the ship.
All the vessel factors are already listed above. Thus, depending on the vessel particulars, service, routes and other aspects, the feasible effects can be studied to improve the design.
When we talk of optimized design for desired seakeeping characteristics, we also need to decide our highest goals and mission requirements for that particular design scenario.
For instance, a containership needs to be designed to counter high degrees of wave resistance which can hinder its expensive freight time and oppose large rolling motions since it also carries many lashed containers in its open deck.
Similarly, a passenger ship has to infallibly look into the safety and comfort of its passengers on board. Likewise, a naval vessel has to consider several aspects like the integrity of weaponry and systems or other items like aircraft, choppers, tanks etc., and it is carrying on board.
Though the seakeeping effects depend on that particular scenario of the vessel, some crucial things can be discussed in a broader sense.
- Hull Size is one of the foremost aspects. The larger the hull size relative to the waves, the larger its resistance to heavy motions underway and vice versa. So, we rarely find small vessels like trawlers or small yachts in open oceans. Both length, breadth and the design draft have their roles in response to various disturbances.
- Displacement. In common sense, the greater the vessel’s displacement, the larger the moment of inertia offered in a physical sense to these oncoming disturbances. So, due to the lesser excitation forces in response to waves, the acceleration and motional parameters are low.
- Intact stability and its designated parameters have a great role to play in terms of seakeeping. The more inherently stable the ship is, both in a longitudinal and transverse sense, the higher its seakeeping characteristics. However, caveats are there. We all have heard of “stiff” and “tender” ships. Stiff ships have a large metacentric height, the GM. Hence, they have smaller roll periods, i.e., the vessel tends to become upright very fast when heeled due to an external disturbance. These short rolling periods can lead to rapid rolling motions of the ship, impairing its seaworthiness and human habitability.
- Conversely, tender ships have a low metacentric height (GM) and, thus, high roll periods. They take a lot of time to return to their original upright position and have chances of capsizing. Thus, a designer has to make such optimizations by looking into all aspects carefully.
- Freeboard and reserve buoyancy: While some vessels have high draft requirements, care has to take such that the draft is within feasible limits as low freeboard (and hence low reserve buoyancy due to high draft) can pose a threat of deck immersion and flooding in high wave heights. Conversely, low drafts (and hence high freeboard) can lead to keel emergence and hence ‘slamming’ of the bow or stern.
- Hull Form is perhaps the most contentious facet. While the hull form may vary depending on vessel type, the hull form may be optimized within a particular design to improve seakeeping performance. A fuller or bluff hull form with high B/T and low L/B ratios offers higher added resistance from waves than finer hull or wedge forms. Also, a larger beam increases the wave excitation effects. Conversely, finer hull forms or V-forms can increase rolling motions, short capsizing, and flare slamming problems.
- Similarly, increasing the length with reduced Block Coefficient (Displacement/[LXBXT]) can lead to larger heaving motions. However, an increase in length concerning the draft itself (L/H ratio) instead of the block coefficient can lead to comparatively lower heave motions. Furthermore, fuller entrance shoulders and larger forward waterplanes improve seakeeping performance and reduce problems like keel emergence. So, there is no lucid framework for achieving the ‘best seakeeping performance.’ An improved design can be envisioned from experience, optimization of all such factors, and suitably prioritizing the requirements.
- Bow forms depending on the vessel also greatly influence the design. For example, bulbous bows are said to attenuate significantly incident wave trains through harmful interference, thereby minimizing effects on the structure.

Several criteria exist as benchmarks for assessing the seakeeping behaviour of vessels. International governing and regulatory bodies like IMO and ITTC has kept developing guidelines and advisories based on increasing requirements, improved analysis and testing technologies and accidents.
In IMO, the Sub-committee of Ship Design and Construction (SDC) looks into this from time to time. Recently, IMO has made notable developments in high-speed crafts’ requirements in its HSC Code.
Some crucial standards exist for estimating seakeeping performances in vessels. Bales’ Seakeeping Index is one of them. It considers several vessel parameters and determines the seakeeping efficiency on a scale rating from 1 (least) to 10 (best). However, it is argued that this is mainly suitable for naval vessels.
Seakeeping remains perhaps one of the most challenging phases in design. An ideal seakeeping performance cannot be achieved. However, with time and experience, developments for better design tend to make vessels safer and more reliable.
Frequently Asked Questions
1. What is seakeeping in a ship?
Seakeeping or seaworthiness measures how well the ship or vessel is suited to the conditions when at sea. A vessel is said to be seaworthy if it can operate effectively and guarantee human safety even on high seas with rough conditions.
2. What do you mean by seakeeping analysis?
Seakeeping analysis predicts how a vessel will move in a particular sea state. Any ship moves in linear-heave, surge, sway, rotational, roll, pitch and yaw manner. However, its movement depends on many factors considered during the seakeeping analysis.
3. How do you calculate ship acceleration?
You can apply Pythagoras theorem: a = ( av² x at² x al² )½
This formula would give you combined acceleration, and you can multiply the resultant acceleration (a) by the mass.
4. What are the three basic motions of a ship?
Three motions occur along the three axes. The rotational motions of yawing, rolling and pitching originate from force couples put up at different vessel areas. For instance, rotation around the vertically positioned Z-axis is called yawing.
5. Who decides if a ship is seaworthy?
It is the job of the shipowner to see if their vessel or fleet is seaworthy. It is ensured by carrying out necessary procedures and undertaking studies, surveys and inspections to ensure the safety of people and cargo onboard. If any issues arise at sea, the shipowner is held accountable and is liable to pay fines and penalties.
You might also like to read:
- What is Seaworthiness, And Why is it Important?
- Ship Motions: The Ultimate Guide
- Why Ships Sink: 10 Major Reasons
- Stopping a Ship: Why Ships Cannot Have Brakes?
- Understanding Intact; Damage Stability of Ships
Disclaimer: The author’s views expressed in this article do not necessarily reflect the views of Marine Insight. Data and charts, if used in the article, have been sourced from available information and have not been authenticated by any statutory authority. The author and Marine Insight do not claim it to be accurate nor accept any responsibility for the same. The views constitute only the opinions and do not constitute any guidelines or recommendations on any course of action to be followed by the reader.
Do you have info to share with us ? Suggest a correction

About Author
Subhodeep is a Naval Architecture and Ocean Engineering graduate. Interested in the intricacies of marine structures and goal-based design aspects, he is dedicated to sharing and propagation of common technical knowledge within this sector, which, at this very moment, requires a turnabout to flourish back to its old glory.




Latest Naval Arch Articles You Would Like:


Subscribe To Our Newsletters
By subscribing, you agree to our Privacy Policy and may receive occasional deal communications; you can unsubscribe anytime.