

What is Squatting of Ships?
In our previous article, we discussed underwater keel clearance and its importance in detail. We also briefly learnt about the squatting effect of ships, concerning its implications on underwater keel clearance. In this article, we are going to discuss some more on this interesting hydrodynamic phenomenon.
What is squatting?
Squatting is a hydrodynamic phenomenon that occurs when a vessel travels in shallow waters; that is, there is a limited extent of depth available in the region of interest. As a result of squatting, the vessel tends to sink or experiences a sudden loss in draft. This effect leads to the risk of grounding of the vessel if the depth in the adjoining waters is insufficient.

First and foremost, when we start discussing the squatting effect, it is important to revisit some of the basics of hydrodynamics and the physics of fluids.
Continuity
From the basic principles of nature, any fluid passing through a finite space or system will have a constant volumetric flow, assuming the flow is steady, non-viscous, incompressible, and no losses are underway.
In simpler terms, at a given point in time, any volume of fluid entering a closed system will remain the same when it exits the system, provided it meets the aforesaid conditions. The simplest depiction of this problem would be a pipe with different cross-sectional areas (A1 and A2) at the inlet and outlet.
Suppose a stream of pure water having some Volume, V enters the pipe through inlet A1; the same volume V would emanate from outlet A2 assuming there are no losses or other effects underway.
Now, consider that outlet area A2 is smaller than inlet A1. What will happen? At a certain point in time, the volume entering the system should remain the same as the volume exiting. Thus, to maintain this equality, the flow rate or the velocity of the flow increases.
Thus, the flow rate at outlet A2 would be higher than at A1 such that the same volume of water exits as the volume entered at any given point in time. Hence, from the simple relationship:
A1 X V1 = A2 X V2 (A1>A2)
Where A1 and A2 are the areas, while V1 and V2 are the flow rates at the inlet and outlet, respectively.
As A1 is greater than A2, the velocity of flow V2 is more than V1. Each side of this equation has the units of cubic metre per second (metre sq. m2 X metre per second m/s), which essentially means that the volumetric flow rate or the volume of water passing the region under consideration at any given point of time is constant.
Pressure and Bernoulli’s principle
We must have read about Bernoulli’s principle governing simple flows sometime or the other. This concept of flow takes a step ahead of the aforementioned theory and describes the flow in terms of pressure as well. What is pressure in fluids? Pressure in fluids is of two types: Static and dynamic.
What is static pressure?
Consider an object deep down in the water at a depth of h. As we know, the static pressure acting on the object is the static pressure that can be defined as the product of the density (ρ), acceleration due to gravity (g=9.81 m/s2), and depth (h). [static pressure = ρ X g X h].
In a perfectly calm environment like a closed tank filled with water, any object located at a certain depth would predominantly experience simple static pressure as defined. The basis for static pressure is potential energy.
What is dynamic pressure?
In most physical environments like seas, rivers, streams, and so on, there is a significant amount of pressure associated with the kinetics or motion of the flow as well, known as dynamic pressure.
The magnitude of this pressure solely depends on the flow velocity for a given density of the fluid. This component of pressure is related to the kinetic energy associated with the fluid. It can be defined as half of the product of the density and the square of the flow velocity. [Dynamic pressure = ½ X ρ X V2].
According to Bernoulli’s principle, the sum of the static and dynamic components of pressure essentially remains constant in an area under consideration.
Static pressure (ρgh) + Dynamic pressure (½ ρ V2 ) = constant (P)
Expressing otherwise, P + ½ ρ V2 + ρgh = 0
Hence, as per this relation, the static and dynamic components of pressure are inversely related to one another.
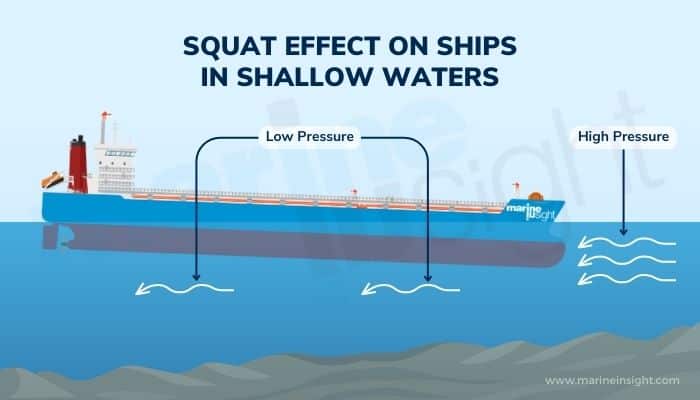
This same theory forms the basis for the squatting effect on vessels. Now, look at the figure where a vessel is moving in shallow waters.
Note carefully that for the flow oncoming from the opposite side, there is a significant decrease in the area when it encounters the vessel.
Applying the concept of flow continuity leads to an increased flow rate owing to the decreased space. Henceforth, the flow intensity increases dramatically underneath the vessel at the region of restricted clearance between the vessel and the seafloor.
At this point, due to the increased flow rate at the underside of the hull, the dynamic pressure also increases. This leads to a decrease in the static component of pressure as explained above.
As static pressure or, more precisely, hydrostatic pressure is closely related to the buoyancy forces involved in the flotation of the vessel, this pressure drop is manifested in the form of loss in buoyancy and, consequently, a sinkage of the vessel.
This effect of sinkage or loss in the draft due to the drop in static pressure head is the squatting problem experienced in vessels at shallow drafts where there is a limited clearance margin between the underside of the hull and the seafloor.
Now there is a common misconception that squatting leads to the vessel sinking uniformly in the draft. However, that is not the case.
Squatting often leads to trimming, healing, or differential drafts. At the same time, moreover, a vessel already in heeled or trimmed conditions encounters the problem of squatting differently from a vessel at an even keel. Continue reading below to gain more knowledge on this.
Now, let us quickly summarise the factors governing squat and its extent.
Depth: As mentioned above, depth is the most important factor. The lower the available depth, the lesser the available under-keel clearance and hence, the more pronounced the effects of squatting.
Draft: Similarly, for higher displacement vessels in lower drafts, the greater are the effects of squatting owing to the higher draft and low under-keel clearance between the underside of the hull and the seafloor.
Speed: The speed of the vessel also plays a very crucial role. As we have seen, due to lower under-hull clearance, the flow rate increases dramatically, and this causes the pressure drop.
Now, the pattern of this flow is further influenced by the vessel motion. If the direction of the vessel and the flow is the same due to constructive interference, the relative velocity of the water further increases.
This inherently increased flow rate reaches a higher value when passing underneath the hull, further exacerbating the squatting effects.
If the flow direction is opposite, in that case also, the squatting effect is quite pronounced but somewhat lesser than in the case of constructive interference. The effects of squatting are comparatively lesser when the vessel has very low or zero speed.
Block coefficient: We mentioned above that squatting of a vessel is related to heeling or trimming. The block coefficient of the vessel plays an important role in the trimming characteristics.
It has been observed that a vessel with a block coefficient above 0.7, that is, if the vessel is considerably bluff in hull-from (like tankers or bulkers), there is a tendency to trim forward, assuming other conditions as fixed and the vessel previously on even keel. Conversely, for vessels that are finer in form (block coefficient < 0.7), there is a trimming tendency aftward.
Seafloor topology and nature: We have discussed much of this in our previous article on underwater keel clearance. The seafloor is seldom uniform in nature. Hence, the nature and topological characteristics of the seafloor or bed also play a very important role in the squatting effects.
Consider, for example, a vessel floating on an even keel in the shallow draft at a seafloor having a differential nature, as shown. As there is a lower margin or clearance near the forward end as compared to the aft, the squatting effect increases near the bow. Thus, the vessel tends to trim to the front.
At this point, the above factor also comes into play. If the vessel is of fine form, it has an inherent tendency for trimming aft, and the forward trim may be quite less. However, in the worst case, if the vessel is bluffed as well, this trimming by the bow is increased considerably, and the vessel has a very high risk of running around from the bow.
Already existing conditions of heel and trim: If the vessel has differential drafts transversely or longitudinally, due to heel or trim, the squatting effect essentially further increases towards where the draft is higher (and clearance is low) as explanatory.
Restricted or unrestricted waters: When the vessel is also in a restricted area of water like a canal, the squatting effects further increase as the flow of water is further augmented due to physical boundaries in both vertical and horizontal ways. Furthermore, in restricted waters, there is an effect similar to squatting in the lateral direction that pulls the vessel towards the sides in what is known as the banking or suction effect. We shall discuss this in detail in some future articles.
Other miscellaneous factors like vessel traffic density, waves, sea states, seakeeping motions of the vessel, and so on.
The interplay of all such factors in varying amounts decides the extent and nature of squatting.
Calculation
As squatting is a very random and complicated effect, which depends on the interplay of several factors, and that too, often dynamically, there is no definitive calculation. The calculations have changed over time, and are often hydrodynamically derived, based on numerical or experimental methods.
However, for all practical purposes, most of the calculations are based on three very important factors: Speed, hull form, and displacement.
A very simplistic empirical formula that has been used for calculating the extent of squat is as follows:
Squat= k X Block coefficient X (V2/100)
Where V is the vessel speed. K is equal to 2 for confined water conditions, congruous with the theory that the squatting effect increases more in confined conditions, as discussed above.
Elsewhere it may be taken as 1.
Several hydrodynamic software or tools based on computational models and real-time simulations have made squatting estimations more realistic and accurate.
You might also like to read-
- What are Margin Lines in Ships?
- What Is The Centre Of Floatation?
- How Are Containers Stacked And What is Stacking Weight ?
- What is Rise Of Floor in Ships?
Do you have info to share with us ? Suggest a correction

About Author
Subhodeep is a Naval Architecture and Ocean Engineering graduate. Interested in the intricacies of marine structures and goal-based design aspects, he is dedicated to sharing and propagation of common technical knowledge within this sector, which, at this very moment, requires a turnabout to flourish back to its old glory.





Latest Naval Arch Articles You Would Like:

Subscribe To Our Newsletters
By subscribing, you agree to our Privacy Policy and may receive occasional deal communications; you can unsubscribe anytime.