

Understanding Different Types Of Manoeuvres of a Vessel -Part 2
In the previous article, we had an overview of the different types of manoeuvres undertaken by a ship, along with their necessary trials done post-launch. We also learnt about Turning Circle; however, is knowing the turning ability of the ship in response to control sufficient to guarantee the entire manoeuvring ability of the ship?
To answer this question, we will discuss the remaining types of manoeuvres, their necessary check-trials and purpose.
Types of Ship Manoeuvres:
Zigzag Manoeuvre
This type of manoeuvre is also known as the Z-Manoeuvre or the Kempf Manoeuvre. In some situations, a ship is required to change its course or heading. Sometimes in rough seas or in cases of directional errors, the ship may be required to change its direction more rapidly within a limited span of time. So, the ability to zigzag manoeuvre should be an inherent property in the manoeuvring characteristics of a vessel. The trial for this is conducted as follows:
- The ship is steadied on a straight line course in the sea conditions described in the previous article
- Then the rudder angle is applied to a pre-defined angle of 10 degrees or 20 degrees to either port or starboard. This is termed as the ‘First Execute’
- In response to the rudder, the ship changes its yaw motion towards the applied rudder angle and gradually changes its heading
- After a certain defined angle of heading is reached (not to be confused with the rudder angle as the heading angle is purely the angle between the ship’s own centreline and the reference space coordinates of the earth; a measure of the ship’s course), the rudder angle is immediately reversed to the exactly opposite value. If the first execute rudder angle had been to port, it is reverted to starboard and vice-versa
- Consequently, the ship’s yaw rate begins to change towards the applied direction. The ship begins to change its heading once again
- Again when it approaches the steady approach in that direction, the rudder is swung in the opposite direction
- The cycle is iterated for a definite number of times

What are the results inferred from the above test? The main objective of conducting this trial is to check that the ship response in changing its course in effect to a given rudder angle along with the variation in Yaw rate. It is also a measure of the path stability of a ship, the more it takes time and effort to change its heading, it is said to be ‘stable by path’. Vice-versa is path changing-ability. The requirements differ from one vessel to another. In naval vessels, there may be a need of greater path-changing ability whereas, for a cargo carrier, it may be the opposite.
Some Important Terms Determined during the test:
- Initial Turning Time: the time taken to change course or heading in response to rudder execute. Time taken to change yaw in a particular direction
- Overshoot angle: This is a very crucial parameter determined using this test. Overshoot angle is defined as the excess angle of heading reached by ship in its previous direction (after rudder is applied). Most designs seek least overshoot angle as it is desirable for better controllability
- Yaw rate/turning speed in the changed direction.
- Reach: The time between the first execute to when the heading angle is zero.
Based on the permissible values of rudder angle, zigzag test can be of two types:
- 10 degree zigzag manoeuvre
- 20 degree zigzag manoeuvre
Let us now analytically delve a bit further into the analysis of zigzag manoeuvre. (Figure 2)
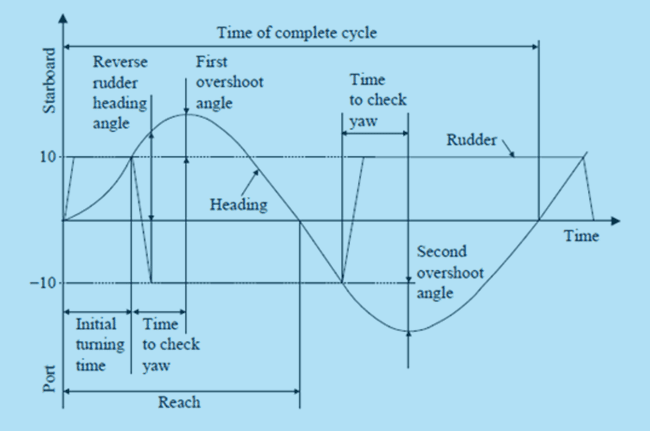
First, the rudder angle is applied to starboard (at 10 degrees). This alters the ship’s heading angle to starboard gradually. After a certain span of time, the rudder angle is reversed. In effect to this change, the ship’s heading angle again starts reverting to port.
This is a point where the overshoot is measured from the curve. In all practical cases, the ship does not have the ability to immediately revert to port after rudder is applied. It yields to some heading angle in its ‘set direction’ after gradually yawing to port. This excess the angle of heading it attains before reverting again is a measure of the Overshoot angle.
The peak of the curve that is where the heading changes its “tendency” in response to the rudder angle. On similar lines, going through the time axis, the time taken to change its heading at each course in response to rudder action is also a measure of the manoeuvring efficiency of the ship. This is given as the ‘Time taken to check Yaw’. After crossing the zero line, it approaches towards the negative heading angle (to port, in this case).
Again after some time, the rudder is reversed to starboard. The ship reverts to starboard again after undergoing a certain overshoot.
Spiral Manoeuvre
This is a measure of the directional stability of the vessel. Imagine a situation where your vessel drifts off the course without any indication and when it is detected, the change in direction is already very large. This condition is not appropriate for navigational wellness.

Consider another situation where the vessel is required to swerve past some obstruction. The rudder angle is applied in the necessary direction to avoid a collision but for some time the vessel continues to go in that direction before changing the rate of heading. But it is already too late and the unwanted occurs. No one would prefer to face that situation, would they? So, the efficiency of the ship in terms of its directional stability is measured by its ability to change its direction in immediate response to its rudder action.
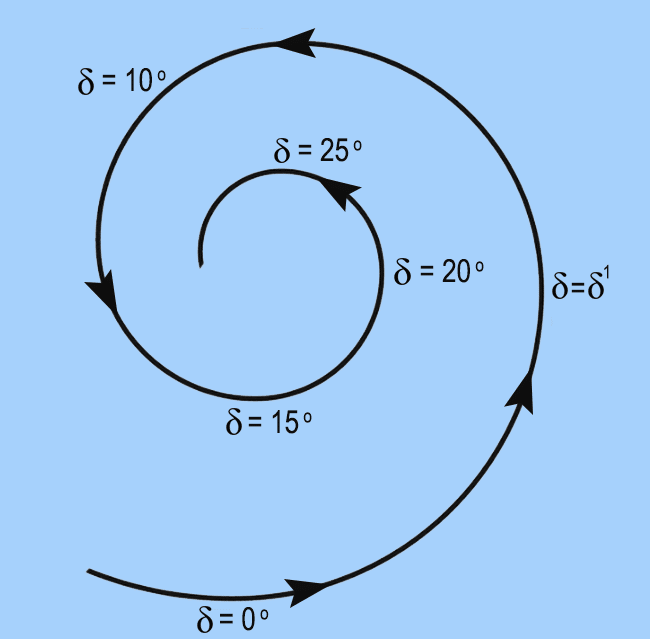
The spiral manoeuvre also known as Dieudonne spiral is conducted for this purpose. This test is somewhat similarly done as zigzag but the rudder deflection angles are constantly varied from port to starboard (+15, +10, +5,0,-5,-10,-15, for example).
The spiral manoeuvre trial is conducted as follows:
- The ship is steadied on a straight line course
- After that, the rudder is put hard over to one side until the rate of change of heading is constant (Constant Yaw rate)
- The ship is steadied for this new rate of heading. Then it is again given a rudder deflection to a higher value, say 10 degrees.
- The process is repeated for successive values of rudder angle till the rudder has covered the whole range to maximum rudder angle on the given side
- The entire process is conducted in the reverse direction, that is if the rudder turns are given for successive values on the starboard side (+5, +10, +15….) , it now given to the opposite direction to the port side ( -5, -10, -15….) to give a counter clock path
- The path observed, in either case, is a spiral as shown in the figure
- The rate of turn or yaw is noted for each rudder angle
- The yaw rate is plotted against rudder deflection angle for analysis
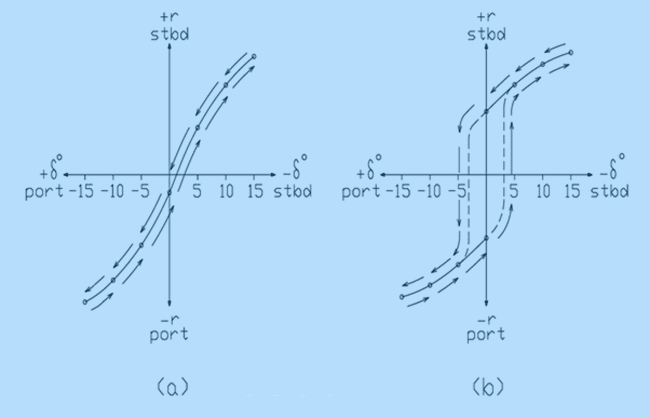
The above figure shows the rudder angle versus the rate of change of heading. In figure 5(a), the values are plotted for a perfectly directional-stable ship. Applying a rudder deflection to starboard yields a heading in that direction. So the yaw rate (rate of change of angular heading), “r” varies proportionally to the rudder deflection in the same direction. When the rudder angle is brought back to its mean position (zero deflection), the angle of heading also gets back to zero along with the yaw rate. Hence, the ship does not have any ‘residual heading’ in that direction and is considered perfectly stable. Similarly, again turning the rudder to port gives a proportionate increase of yaw rate to port. The curve passes through the origin.
But rarely do we find such ideal results. Environmental factors such as sea states, currents, waves along with the interplay of rudder response, engine performance and other hydrodynamic factors lead to instability as shown in figure 5(b). Here, even when the rudder angle is brought back to zero in either case of port or starboard the rate of heading angle remains non-zero. That is, in response to rudder angle change there is a ‘directional set’. This is indicated by the dotted lines. When the rudder is brought back to zero after the starboard turn, the rate of change of heading remains to some starboard value and then gradually starts reverting to port. Similarly, it is true in the opposite case. Thus the curve plotted (yaw rate vs rudder angle) in both clockwise and counterclockwise turn gives a kind of hysteresis loop. None of the yaw rates from any sense is zero for an immediate response to the rudder. This hysteresis loop is a measure of the ‘directional instability’ of the vessel.
This test should be essentially performed for yaw unstable ships going from port to starboard and from starboard to port. However, some of the big limitations of performing this tests are congenial sea states and a large expanse of water. Also, it is very time-consuming.
Reverse Spiral
As an alternative to spiral manoeuvres, reverse spiral tests were introduced by Bech. This is very much similar to direct spiral manoeuvre with one basic change. The ship is now strictly made to turn at a constant rate of turn (yaw rate). This is achieved by manipulating the rudder accordingly. Thus this is exactly the opposite of what was done in direct spiral manoeuvre (where the yaw rate was variant for a particular rudder deflection)!
This is conducted for a range of yaw rates from +0.5 degrees per second rate to starboard to -0.5 degrees per second to port. This is plotted against the rudder deflection as shown in the following figure.
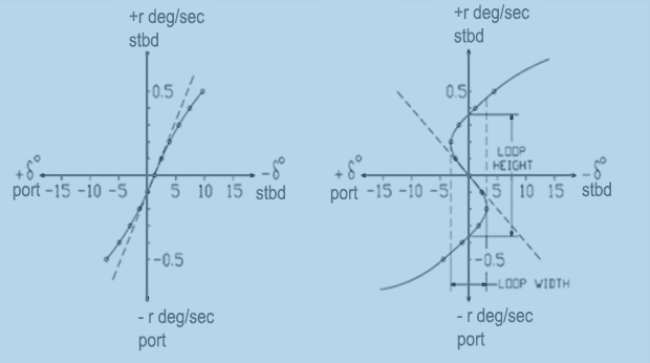
The slope of the curve at the origin gives a measure of the degree of directional stability. In figure 6(a), the slope at the origin (r-δ at δ=0) is negative, hence the ship is said to be directionally stable.
On the contrary in figure 6(b), a kind of hysteresis is formed in the form of an S-shape similar to direct spiral (except it is an open loop in this case). The slope of the tangent at the origin is positive and the ship is said to be directionally unstable.
The aspect of rudder deflection versus yaw rate, in this case, is somewhat analogous to the righting lever (GZ) versus heel angle (φ) in the case of static transverse stability problem.
Pull-Out Test
This test is a relatively simpler to determine the stability of the ship on a straight course.
The steps taken to conduct this trial are:
- The ship is made to turn in both port and starboard directions for sometime.
- After a steady rate of yaw in the particular direction is achieved, the rudder is brought back to its mean position.
- The rate of turn exhibited over the entire span of time is recorded for both port and starboard turn.
- The nature of the rate of turn is characterised by plotting against time.
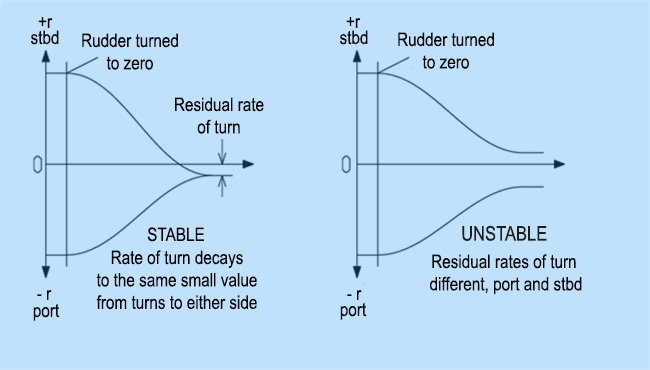
Theoretically, for ideal conditions the rate of heading must revert back to zero after the rudder is brought back to zero. But practically, this is rarely the case as there is always some nonzero value of heading in either direction (port or starboard). However, as long as this is similar in both directions, it is still considered stable. But if it is different in both port and starboard, it is unstable. In most of the ships, there is always this ‘residual rate’ of heading due to the asymmetry of flow across the hull and sometimes due to propeller influence (in the case of single screw ships).
Stopping Ability
Accelerations, stopping and backing are not part of manoeuvring exercises but they are still carried out in tandem with the above manoeuvres to check the safe stopping distance and motion efficiency of the vessel. Imagine a critical situation where there is an obstruction ahead at a limited distance and the ship is required to stop or reduce its speed.
Thus stopping trials such as “Crash Stop” are crucial for estimating the performance of the vessel under this kind of circumstances.
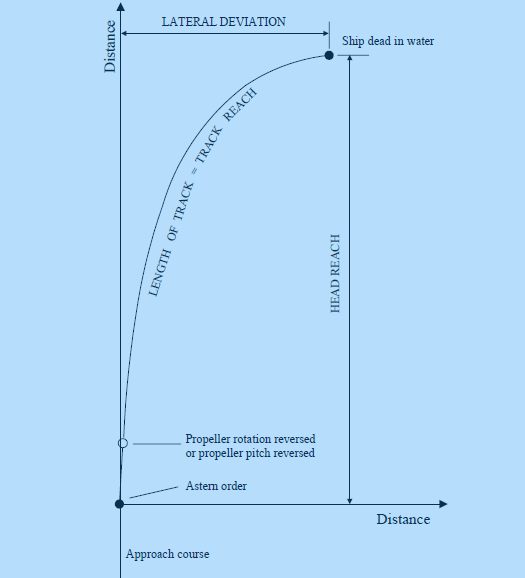
Stopping ability is measured by the “track reach” and “head reach” realised in a stop engine-full astern manoeuvre performed after a steady approach at the test speed until ahead speed in ship coordinates changes sign (i.e., vessel starts going backwards).
- Track Reach is defined as the distance traversed by the ship in its own path after the “astern command” is given (engine reversed) until the vessel starts heading backwards.
- Head Reach is the perpendicular distance (displacement) that is measured from the point of execute (reverse order given) to the point where the ship starts coming backwards (after stopping).
Both Head Reach and Track Reach along with the time taken to achieve so are of paramount concerns to the ship designer, the engine maker, as well as to the seafarer. Most safe designs tend to achieve the least distance and time required to decelerate and stop. However, propeller performance, sea conditions, displacement of the vessel and efficient control hierarchy on board are some of the other indispensable factors.
Motion and Control of a vessel along with their trials play a pivotal role in the design and also in the post-launch stage as we had already said earlier. IMO has its own criterion while performing each of the above trials which we leave it you to find out of interest. Modern techniques of model tests, Computational Fluid Dynamics (CFD) or Boundary Element Methods (BEM) aided by software have eased manoeuvring and seakeeping analysis to a great extent. Nevertheless, these full-scale trials still are considered the most holistic approaches and are continued to be carried out for each and every vessel.
Disclaimer: The authors’ views expressed in this article do not necessarily reflect the views of Marine Insight. Data and charts, if used, in the article have been sourced from available information and have not been authenticated by any statutory authority. The author and Marine Insight do not claim it to be accurate nor accept any responsibility for the same. The views constitute only the opinions and do not constitute any guidelines or recommendation on any course of action to be followed by the reader.
The article or images cannot be reproduced, copied, shared or used in any form without the permission of the author and Marine Insight.
Do you have info to share with us ? Suggest a correction

About Author
Subhodeep is a Naval Architecture and Ocean Engineering graduate. Interested in the intricacies of marine structures and goal-based design aspects, he is dedicated to sharing and propagation of common technical knowledge within this sector, which, at this very moment, requires a turnabout to flourish back to its old glory.
Latest Marine Navigation Articles You Would Like:













Latest Naval Arch Articles You Would Like:



Subscribe To Our Newsletters
By subscribing, you agree to our Privacy Policy and may receive occasional deal communications; you can unsubscribe anytime.