

Real Life Incident: Contact With A Buoy And Near Collision
A VLCC in ballast was approaching port for anchoring. The pilot was confirmed for 10:00. Weather conditions were good with a northerly wind of about 10 knots, good visibility and slight sea conditions. A tidal stream was running in the WSW direction at about 1.8 knots. The engine was put to dead slow ahead to drop off speed and adjust vessel’s arrival at the pilot boarding area for the prearranged time.
At 09:37, the Master asked the OOW if he had established a visual contact with the pilot boat. The OOW responded positively. The bridge team was confident that the pilot boat would be at the designated position before their vessel, so no action to further slow or stop the vessel was taken. Several minutes later, with the vessel steering 300 degrees and with a speed of 5.8 knots, the remaining distance to the pilot station was about 1.2nm.

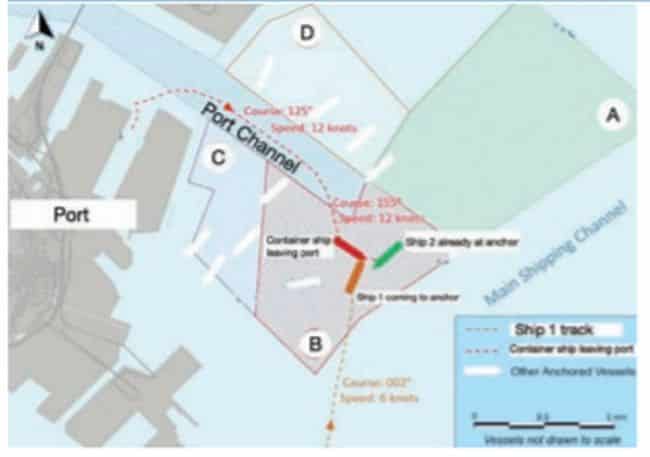
At 09:50, the vessel was heading 315 degrees at a speed of about 5.3 knots and the distance from the pilot station was now only about 0.7nm. The Master stopped the engine. The vessel continued to slow and the heading now increased slowly to starboard. The vessel was closing on a buoy. At 10:00 the speed was about 4 knots and the pilot boat had not yet arrived. The Master ordered hard starboard and set the main engine to dead slow ahead in order to avoid the buoy but to no avail; they struck the buoy about four minutes later on the port side near midships. The buoy slid down the vessel’s port side and cleared the stern with only minor damage.
But now, as the vessel drifted with a Speed Over Ground (SOG) of 3.4 knots, their trajectory was towards a nearby anchored vessel. The Master attempted to stop the vessel but the distance to the anchored vessel was now only 0.5 nm. The Master quickly concluded that it was not feasible to stop the vessel. Instead, by putting “Full Ahead” on the engine in combination with a succession of wheel alterations (hard to starboard and then hard to port) they managed to avoid contact with the anchored vessel.
About 20 minutes later, the pilot boarded and subsequently safely anchored the vessel in the anchorage area.
The company report found, among others that;
- The passage plan lacked the appropriate precautions and contingency arrangements. Specifically, the speed of approach and the waiting area for the approach were not adequately planned.
- The large drift angle and the proximity of navigational hazards was not determined at an early stage.
- The current’s effect on vessel’s drift was not effectively monitored and assessed. As result, the bridge team did not adjust the vessel’s course and speed in a timely manner while approaching the pilot boarding station.
- BRM was less than adequate. The Master did not explicitly inform the ship’s bridge team about his intentions related to approaching and manoeuvring. As the ship progressed, the OOW’s comprehension of the situation did not trigger any actions for clarification or corrective action.
- The OOW did not provide sufficient information related to the pilot boat approaching. Instead, he confirmed that the pilot boat was approaching without informing the Master of the actual distance from the vessel and the required time to arrive alongside. As a result, the Master wrongly assumed that the pilot boat was closer than it actually was, so he continued on instead of stopping.
Lessons learned
- Effective BRM should be a working culture – a safety habit that is embraced and practiced by all navigating officers. Closed-loop communications should always be used to eliminate any doubt or ambiguity.
Reference: The Nautical Institute
Do you have info to share with us ? Suggest a correction
About Author
Marine Insight News Network is a premier source for up-to-date, comprehensive, and insightful coverage of the maritime industry. Dedicated to offering the latest news, trends, and analyses in shipping, marine technology, regulations, and global maritime affairs, Marine Insight News Network prides itself on delivering accurate, engaging, and relevant information.

About Author
Marine Insight News Network is a premier source for up-to-date, comprehensive, and insightful coverage of the maritime industry. Dedicated to offering the latest news, trends, and analyses in shipping, marine technology, regulations, and global maritime affairs, Marine Insight News Network prides itself on delivering accurate, engaging, and relevant information.
- Real Life Incidents: Near Miss In Open Water And Good Visibility

- Real Life Incident: Poor Situational Awareness Leads to Collision
- Real Life Incident: Monkey’s Fist Knocks on Office Window
- Real Life Incident: Paint Storage Slip-Up On Ship
- Real Life Incident: Checklist Mentality Is A Burning Problem
- Real Life Incident: Vessel Speed Exacerbates Bank Suction





Latest Case studies Articles You Would Like:



Subscribe To Our Newsletters
By subscribing, you agree to our Privacy Policy and may receive occasional deal communications; you can unsubscribe anytime.