

Featured News





Latest Articles

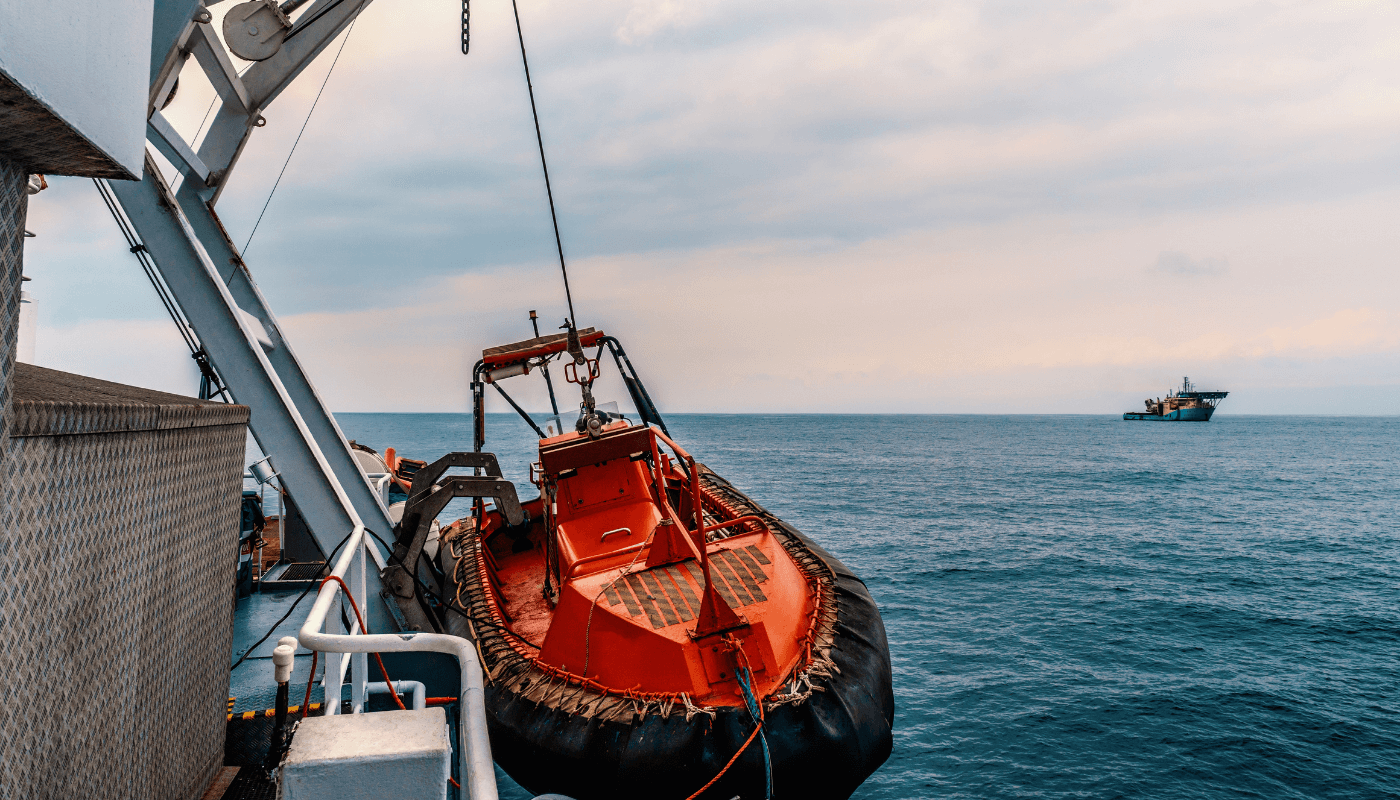
What are Fast Rescue Boats?
Fast rescue boats are essentially specialised high-speed crafts, which are smaller and used extensively for response and rescue operations in water.

What are Logistics Risks?
For a successful transaction of buy-sell or vice versa, all logistics risk factors have to be considered, managed, and countermeasures executed leaving no room for error.
A Guide To IMU CET Exam 2024
IMU CET is an important exam for aspiring maritime professionals in India since clearing it is mandatory for entering the Merchant Navy. Know more about IMU CET examination inside the…

How Port and Terminal Operators Can Control Emissions?
Learn about the measures port authorities and terminal operators can undertake to reduce direct and indirect emissions.

Top 15 Biggest Aircraft Carriers in the World
The world’s biggest aircraft carrier title belongs to the US Navy’s Gerald R Ford Class battleships.
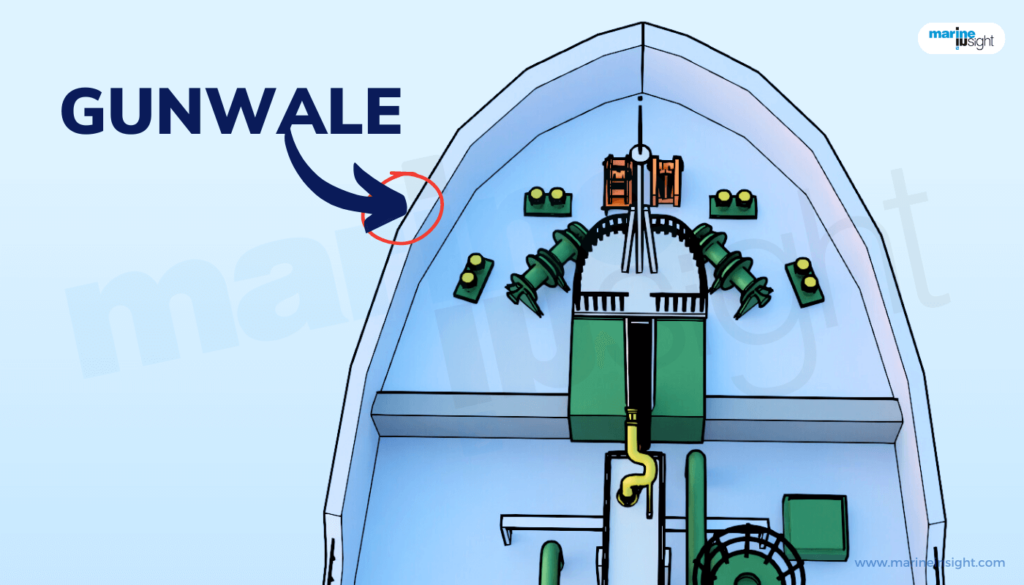
What is Gunwale of a Boat or Ship?
On a boat or a ship, the gunwale denotes the upper edge where the hull and deck converge. Find out more in the article inside.
Maritime Law & Logistics


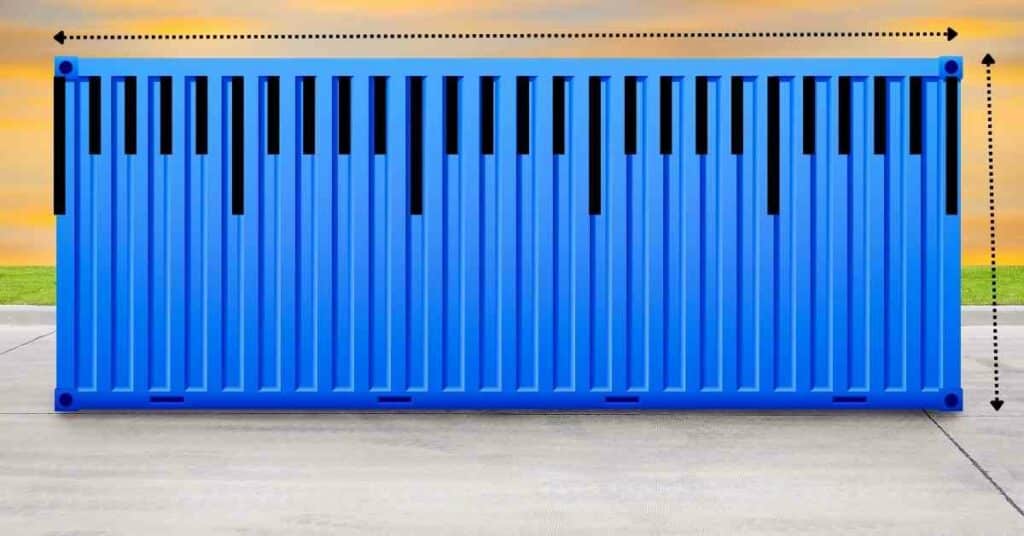
The Ultimate Shipping Container Dimensions Guide
Shipping Containers have made transportation of cargo easier, convenient and safe. Learn about the specifications of the shipping containers, including container dimensions…

A Comprehensive Overview of IMDG Code for Shipping Dangerous Goods
International Maritime Dangerous Goods (IMDG) code has been created to avoid problems for shipping dangerous goods by categorising the aspect & level…
Read More From This Category >
Maritime Safety

What is An Emergency Position Indicating Radio Beacon (EPIRB)?
An Epirb is specialized navigational equipment used at sea to indicate to other ships and shore about a…
Emergency Response Drills On Passenger Ships Explained
Regarding crew drills on cargo & passenger ships, SOLAS, according to its regulation III/19, mentions that every crew…
Download 13 FREE Maritime eBooks
Signup today and get maritime ebooks submitted to your inbox directly.
And don’t worry, we hate spam too! You can unsubscribe at anytime.


Maritime Electrical
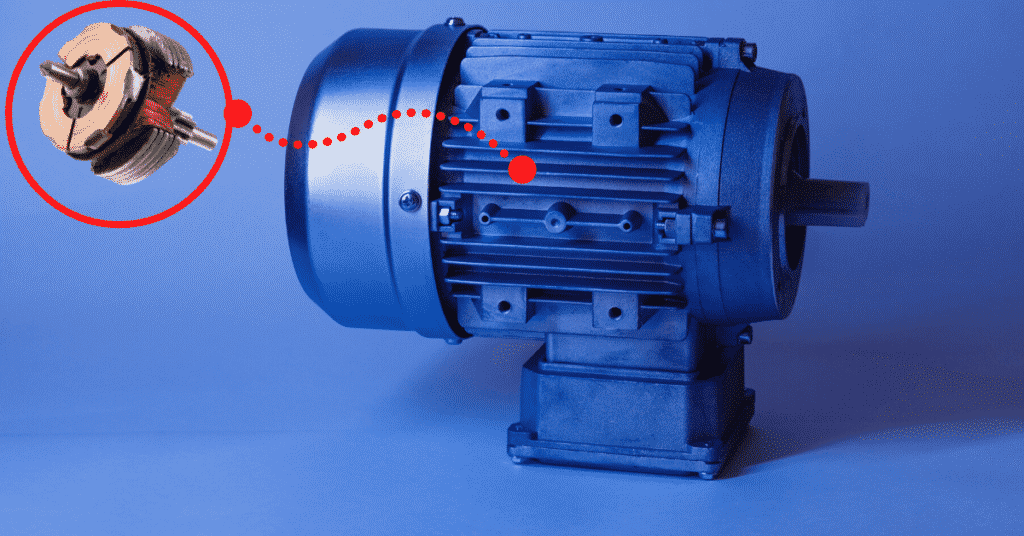
3 Phase Induction Motor – Construction and Working
The popularity of 3 phase induction motors on board ships is because of their simple, robust construction, and high-reliability factor in the…
Permanent Magnet Moving Coil Instrument (PMMC) – Working and Application
For measuring several electrical parameters to analyze and keep machineries in proper running condition, a permanent magnet moving coil (PMMC) instrument…
How to Minimize the Risks of an Electrical Shock on a Ship?
Electrical shock is the worst kind of accident on a ship. In this article you will learn about ways to prevent electrical…




