

Different Types Of Roll Stabilization Systems Used For Ships
Imagine yourself to be one of the first passengers of the Royal Caribbean International – ‘Quantum of the Seas’. As soon as you enter the ship you hear the Master requesting all the passengers & crew members to fasten their seat belts and remain in their respective rooms until the voyage is complete!
Definitely, this is something no passenger would like to hear who has spent a fortune to enjoy the excellent facilities, food and exceptional beauty of such a marvellous ship.
However, this could become a reality if the ship had not been equipped with machinery or is designed in a way to overcome all the various types of motions felt at the seas.
Why take only cruise ships and ocean liners, think about the cargo-carrying ships such as Bulk carriers, Ro-Ro ships or even Tankers & LNG carriers. Just imagine how difficult would it be to carry the cargo (liquid or bulk) safely if we did not have any technology to control the various motions during the voyage.
In this article, we shall be focusing on how we can control the ‘Rolling motion’ of the ship and the various principles behind the different types of Roll Stabilization systems.
Related Reading: Premium eBooks written by maritime professionals
Rolling is indeed the biggest problems among all the other motion in seas. Technological advancements in the design of ships have already given us naval architects the advantage to study the wave motions around the hull of the ship and give the best possible design to minimize such effects & ensure a comfortable and safe voyage for the passengers and the crew.
Roll motion stabilization can be achieved in conventional ships by changing their hull forms, however, reduction in roll amplitudes are possible by other means as well. Stabilization systems can be broadly classified into –
- Passive Systems: In which no separate source of power is required and no special control system like the Bilge keel, anti-rolling tanks (passive), fixed fins & passive moving weight system.
- Active Systems: In which the moment opposing roll is produced by moving masses or control surfaces by means of power like the active fins, Anti – rolling tanks (active), active moving weight & the gyroscope.
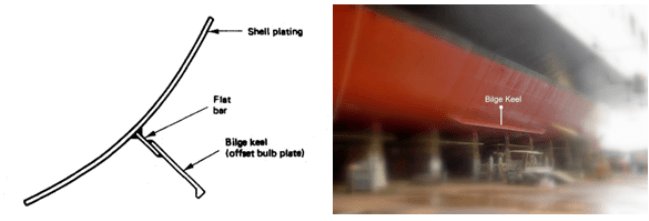
Bilge Keels
Bilge Keels are the most popular and fitted to the great majority of ships. They are plates projecting from the turn of the bilge and extending over the middle half to two-thirds of the ship’s length.
To avoid the damage they do not normally protrude beyond the ship’s side or keel lines, but they need to penetrate the boundary layer around the hull.
They cause a body of water to move with the ship and create turbulence thus dampening the motion and causing an increase in period and reduction in amplitude.
Although relatively small in dimension, they have large levers about the rolling axis and the forces on them produce a large moment opposing the rolling.
Their effect is generally enhanced by ahead speed. They are aligned with the flow of water past the hull in still water to reduce their drag in that state. When the ship is rolling the drag will increase and slow the ship a little.
Anti – Rolling Tanks (Active)
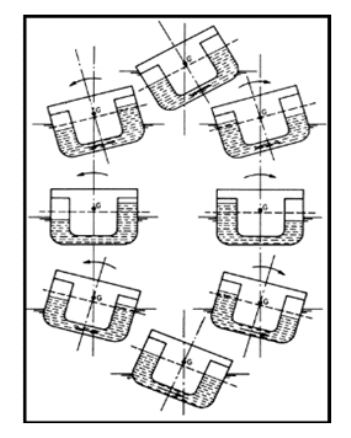
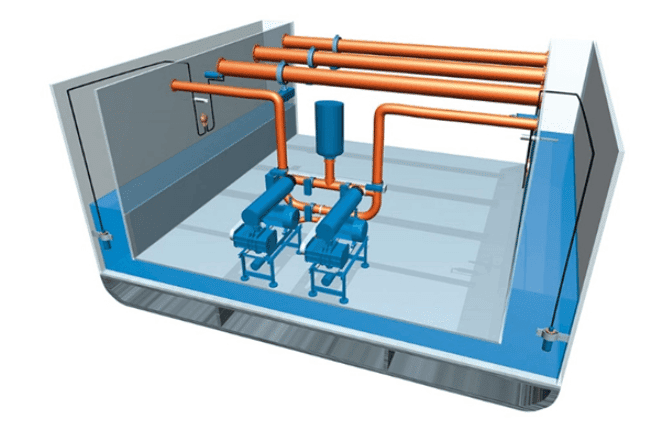
They are similar to the principle of passive tank system but the movement of water is controlled by pumps or by the air pressure above the water surface. The tanks either side of the ship may be connected by a lower limb or two separate tanks can be used.
The air duct contains valves operated by a roll-sensing device. This concept uses an axial flow pump to force the water in the tank from one side of the ship to the other, rather than to have it slosh under the natural roll, sway and yaw forces, as happens in a passive tank.
In a simplified version of an active system, an accelerometer senses the rolling motions, and signals are sent from this roll-sensing device to a variable pitch pump, which controls the liquid flow between the tanks.
The device can be either a simple accelerometer or a complicated gyroscopic sensing system that detects even a small angle of the roll by the gyroscopic precession.
Thus, the device can be used to control ship motion due to every single wave. Depending on the sophistication of the system active tank stabilizers have been found to leave an efficiency of 80% or more in motion stabilization.
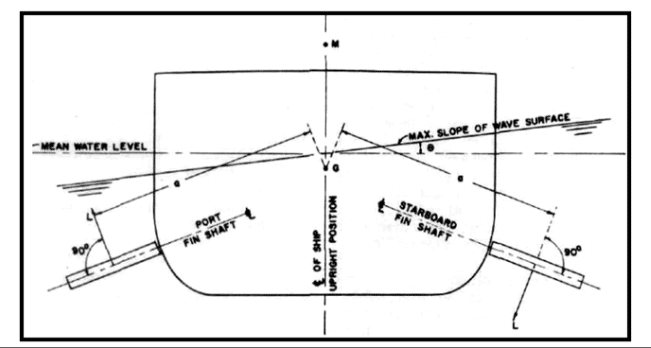
Active Fins
With active fins, a sensitive gyro system senses the rolling motion of the ship and sends a signal to the actuating system which, in turn, causes the fins to move in a direction such as to cause forces opposing the roll. The actuating gear is usually electrohydraulic.
The fins, which may be capable of retraction into the hull, are placed about the turn of bilge in order to secure maximum leverage for the forces acting upon them.
A flap from the trailing edge may be used to enhance the lift force generated. The capacity of a fin system is usually expressed in terms of the steady angle of heel it can cause with the ship moving ahead in still water at a given speed.
The force on a fin varies in proportion to the square of the ship speed, whereas the GZ curve for the ship is independent of speed. However, a fin system is not likely to be very effective at speeds below about 10 knots.

The following table highlights some of the major aspects among the Roll Stabilizers as discussed above:
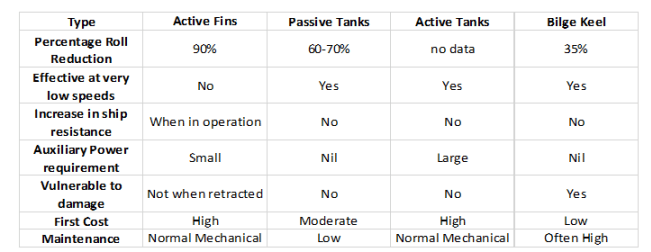
From the above observation, it can be concluded that each and every stabilization system has got its own advantages & disadvantages. Therefore, more amount of effort has to be given to the hydrostatics and the hydrodynamics of the ship hull motion through the waves, so as to avoid the need for kind of roll stabilization system or to use it to its minimum.
Related Reading: Download 12 FREE Maritime eBooks – Click Here.
Also, in principle methods used to stabilize against roll can be used to stabilize against the pitch, but the powers involved are too great to justify their use.
Over to you..
Do you know about any other type of Roll Stabilisation Systems Used For Ships?
Let’s know in the comments below.
Disclaimer: The authors’ views expressed in this article do not necessarily reflect the views of Marine Insight. Data and charts, if used, in the article have been sourced from available information and have not been authenticated by any statutory authority. The author and Marine Insight do not claim it to be accurate nor accept any responsibility for the same. The views constitute only the opinions and do not constitute any guidelines or recommendation on any course of action to be followed by the reader.
The article or images cannot be reproduced, copied, shared or used in any form without the permission of the author and Marine Insight.
Do you have info to share with us ? Suggest a correction




Latest Naval Arch Articles You Would Like:


Subscribe To Our Newsletters
By subscribing, you agree to our Privacy Policy and may receive occasional deal communications; you can unsubscribe anytime.
Web Stories




Love to be in contact with fellow mariners.
Roll damping system for yachts in excess of 30 metres.
A superyacht is synonymous with comfort. To achieve the absolute highest level in on board comfort, a yacht must lie still in the water and not rock to and fro. Owners and guests want to be able to enjoy all luxuries on and around the yacht, from the jacuzzi on the sun deck to a to Michelin rated dinner, without any disruptions.
Stabilizers are installed on almost all superyachts. Stabilizers reduce the non-desirable rolling of a yacht and increase onboard comfort. In turn, this reduces sea sickness and should the yacht come up against bad weather and conditions, the stabilizers improve safety on board. Most superyachts are fitted with a so-called ‘zero speed’ system. There are also systems on the market that stabilize the roll both during sailing and when moored. The performance of these systems are not truly optimal as a compromise has to be made between the sailing and mooring performance.
Thanks to its unique, dual-axis fin stabilizer, which rotates whilst sailing and flaps at anchor, AntiRoll provides stabilization both underway and at zerospeed without any compromise of performance in either circumstance.
The curved, high-aspect ratio fin significantly reduces the drag by between 50 and 75 percent whilst sailing which in turn has a positive impact on the fuel consumption. In addition, with the fin flapping at zerospeed as opposed to rotating, a greater lifting force is generated providing a more stable platform. Of particular interest for sail yachts, the fin is also retractable and can be partly folded back in to the hull. This leaves only minor resistance whilst sailing – a feature welcomed by sailing enthusiasts and which solves well known problems related to non-retractable fins. AntiRoll uses an innovative hybrid drive system resulting in relatively low power requirements.
A combination of towing tests, model tests and experts have confirmed that the AntiRoll system will deliver better performance, both in terms of stabilization and resistance through the water. This low resistance through the water makes AntiRoll ‘greener’ than any other system.
AntiRoll is developed in collaboration with well known parties such as MARIN, TNO and TU Delft and patented.
Find more information about this system at: https://www.dmsholland.com/stabilizers/antiroll/
You could use thrust from the props. I know that Voith schneider units can use roll reduction
yes.really it would more easier to carry a goods without roll and specially crossing an atlantic.
Dear,
I’m Engineer Ramy , and I would like to tell you that I have a great Idea for stability and balancing of ships at sea during storms etc … and I would Like you to help me to deliver it to the right person to test it and start implementing it .
I also have an idea on vessel stability that i would like to share with an appropriate engineer. The system can be used in extreme situations autonomously, or in critical dp situations manually (where vessel stability is paramount). I would love to share my idea with someone in person. Please contact me at smsolar@oceaneering.com for any further conversation regarding this matter.
Table 1 is a useful information. I would like to know the reference for this table since it clearly specify advantages and disadvantages of each stabilization System. I appreciate your response.
The information shown in the table is really useful. I would like to know about the reference where it was taken. In the article express BST, what does it mean?
Your blog will be great help for the pursuing Naval Arch’s.
Thank You Sir
Jagadish Kari
MTech Naval Architecture & Marine Engineering (2016-2018)
Andhra University, Visakhapatnam
MRPC company have all the vessel need, in roll and pitch control.
We were on the cruise ship Celebrity Solstice just this last week and would like to find out just how long are the stabilizers. I thought they told me around 20 feet but my friend mentioned that they would be a lot longer than that. Can you help?