

What Do You Mean By Stopping Distance Of A Ship?
We know that a ship, unlike an automobile, a train, or an aircraft, does not have brakes to stop. The answer lies in the physics of the water and the manner in which a vessel interacts with it.
Hence, for a ship to come to a stop, it must first cease to apply its propulsors’ original sense of rotation (and hence resultant forward thrust) and, thereafter, cause the engines to produce a reverse or astern thrust.
This is often caused by changing the pitch of the propellers to a negative pitch and changing the propulsion such that the thrust now created is the forward direction instead of backward, which in turn, causes the reactionary forces to drive the vessel in the backward direction.
For all practical purposes, this is achieved by turning the propeller blades in a reverse way as compared to before. For other types of unconventional propulsors like Azimuth Thrusters, there are special ways like orienting the placement of the thrusters.
In a nutshell, for a ship, there is essentially a thrust reversal in the opposite direction of its heading that triggers the vessel to gradually come to a halt. Now, carefully note the word ‘gradually’. This is another crucial juncture where a vessel stands out considerably from other modes of transportation.
When we apply brakes to a car on a road or an aeroplane on a runway or a taxiway, the motion is immediately arrested and, within a very short amount of time, comes to a complete stop. The amount of time taken for the moving body to stop after the application of the brakes is known as the stoppage time, and the distance travelled by the body in the given direction in this span of time is k, known as the stopping distance.
Both this time and distance depend on three very important factors: i) the current speed of the body, ii) the size and weight of the body, and iii) the surface on which it moves. So, a small hatchback moving at an average speed will require far less amount of time and distance to stop as compared to a Boeing 777 landing on the runway.
Similarly, the surface is also a critical determinant, thanks to the physics of friction. A vehicle speeding on a wet road will require a more significant amount of time and distance to come to a standstill, unlike one trundling on a rough field.
Moreover, the manner in which the brakes are applied is also important. When you are driving on a rainy road at a very high speed, the brakes should be applied slowly and gradually, as any hard braking can lead to it toppling or dangerously skidding off.
However, for ships, thankfully, all these complexities are absent, and there are only two predominant factors that need to be considered:
- The size and displacement of the vessel
- The speed
Still, from the point of view of hydrodynamics, it is expected that a vessel moving in rough, choppy seas will have a much lesser stoppage or stopping time as compared to one moving in calm waters.
Hence, to summarise, the stopping time of a vessel is nothing but the average time required for the vessel to come to a halt after the application of the reverse thrust. The stopping distance is the distance traversed by the vessel during this interval of time.
Like any other moving body, this time and distance taken to come to a stop can be directly attributed to the inertial effects as described in Newton’s first law. The displacement and the speed of the vessel, combined, indicate the momentum of the vessel. As obvious, the time and distance required for a tanker or a bulk carrier to stop are much greater than a small trawler travelling at the same speed on the same sea surface.

The stopping distance, coupled with the stopping time, is measured as the overall stopping ability of the vessel. This stopping ability of a vessel is of very high importance to both the designer as well as the operator as this is a direct determinant of the margin of safety or the margin of error that can be accommodated at different instances of operation.
In other words, for a given vessel, the stopping distance decides the time or the minimum path at which a ship should be prepared for a halt when any destination or obstruction is a certain distance away.
The effectivity or the competence of a vessel’s stopping ability depends on the minimum stopping distance or the least stoppage time. For a large gas carrier, the master or the captain needs to apply the reverse thrust and work on all procedures in sequence to stall the various operations of the propulsion system.
At the same time, it enters a port or a harbour in a much more planned way as compared to a small ferry. Moreover, the instances of emergencies or exceptions are always taken into account. So, depending on the size and type of the vessel, the speeds at different points of operation take into consideration this stopping distance.
Hence, for a large tanker or bulker, there is always a strict limit to speeds at coastal waters during arrival or departure where there is not only proximity to landmass but also higher traffic leading to increased chances of collision in case of unrestrained motions.
Stopping Process and Sea Trials
Now, in technical terms, there can be two distinct phenomena in which a vessel can come to a stop, and the stopping distance can be defined further accordingly:
- Inertia Stop: This is an older practice of stopping vessels which are seldom used for larger commercial or military vessels these days as there is a requirement for time adherence everywhere. Here the engine power supply is simply stopped, and the vessel comes to a gradual and slow halt by virtue of the hydrodynamic resistance offered by the surrounding water media. This method is very unconventional and so rarely practised by mariners these days. Moreover, due to increased maritime traffic all over, there is limited availability of berths or places in the port or jetty for a given vessel. This time-consuming method cannot be afforded. However, this practice is still widely followed for smaller vessels like fishing trawlers or low-powered ones like short-route passenger ferries. This considerably saves fuel by not only shutting off the engine power beforehand but also as reverse or hard aft ward thrust is neither technically nor economically feasible for them.

- Crash Stop: This method is widely followed in most of the mainstream seagoing vessels. Here, as already discussed above, the engine is given a full reverse or astern thrust. This creates a component of momentum vector in the aft direction, which militates against the ensuing forward motion of the ship, bringing it to equilibrium once the hydrodynamic equilibrium is attained. In instances of crash stops, other than the vessel dimensions and the current speed, the characteristics of the propulsion machinery, including the propeller design, play a crucial role. In certain designs, the entire process may take just a few seconds, whereas, in others, it may take up to a few long minutes.
For all practical purposes, there are two broad stages in the crash-stop process of a vessel:
- Stage 1 (Speed reduction and application of negative power): This stage comprises mainly the time from when the procedure to the astern thrust is initiated, which in ship technical terms is also known as the “full astern” command. During this stage, the engine power is temporarily cut off and then directed so as to produce a negative thrust in the reverse direction. This also involves a reversal of the operation of the propellers or propulsors in unison. As a result, the forward component of the motion is gradually diminished, and the acceleration is increased in the backward direction. In this way, the resultant torque attains a negative value.
- Stage 2 (Gradual stop): This stage encompasses the time from which the negative torque acts to the time when the vessel ultimately comes to a final halt after attaining mechanical as well as hydrodynamic equilibrium, and all sources of supply can be cut off.
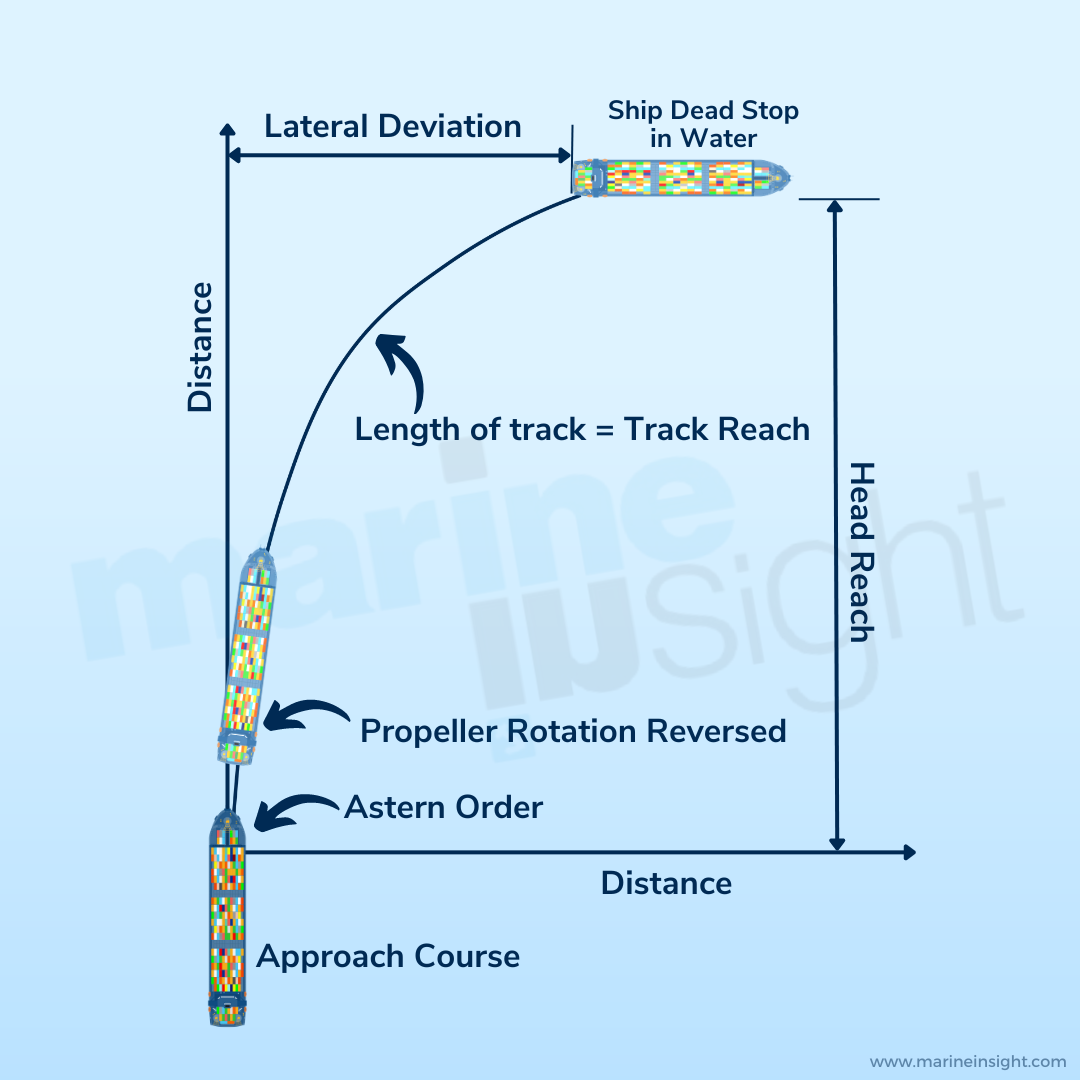
Now, a vessel at sea seldom remains in a perfectly straight line or a steadily fixed path. Due to the action of hydrodynamics, wind, waves, currents, and often the rudders themselves, they deviate from their initial course in varying amounts. So, while measuring the stopping distance, this effect is also taken into account. Look carefully at the following figure.
The vessel initially treads for a certain distance and then slightly deviates from its initial heading before it comes to a halt. The starting point is considered to be the time after which all the procedures related to vessel stoppage or the full astern power are initiated.
The head reach is the linear distance along the vessel’s initial direction vector with the endpoint parallel to the ship’s actual endpoint. It is also a measure of the shortest possible distance. Track Reach is the actual distance measured along the ship’s trajectory. This is always greater than the former. And lateral deviation is the transverse distance which measures the linear offset by which the vessel has digressed from its initial heading.
As per IMO requirements, the stopping capability of a vessel is also mandated to be assessed along with other sea trials. ITTC and other regulations have standard procedures for carrying out these tests, collectively known as Stopping Tests. These stopping tests are of various types but are somewhat similar. All of them measure the minimum distance and time the vessel requires before coming to a halt, along with other factors like engine power and sea conditions.
The aforesaid quantities are measured as well (head and track reach, lateral deviation). Mostly the stopping tests start with full ahead engine power and corresponding speed. Likewise, full astern power is given as well. For all practical purposes, the rudder is always kept in a neutral position while conducting the stopping trials.
You might also like to read-
- What is Collision Bulkhead in Ships?
- Introduction To Different Types Of Yachts
- Different Types of Cruise Ships Explained
- Understanding Frames in Ships
- What is the Stern Of A Ship?
Disclaimer: The authors’ views expressed in this article do not necessarily reflect the views of Marine Insight. Data and charts, if used, in the article have been sourced from available information and have not been authenticated by any statutory authority. The author and Marine Insight do not claim it to be accurate nor accept any responsibility for the same. The views constitute only the opinions and do not constitute any guidelines or recommendations on any course of action to be followed by the reader.
The article or images cannot be reproduced, copied, shared, or used in any form without the permission of the author and Marine Insight.
Do you have info to share with us ? Suggest a correction

About Author
Subhodeep is a Naval Architecture and Ocean Engineering graduate. Interested in the intricacies of marine structures and goal-based design aspects, he is dedicated to sharing and propagation of common technical knowledge within this sector, which, at this very moment, requires a turnabout to flourish back to its old glory.
Latest Marine Navigation Articles You Would Like:









Subscribe To Our Newsletters
By subscribing, you agree to our Privacy Policy and may receive occasional deal communications; you can unsubscribe anytime.