

Real Life Incident: Approaching Port, CPP Stuck At 50% Ahead
As the ferry approached the port, the Master took the control from the OOW. With a little more than 3 nautical miles to go, the Master started reducing the pitch on both controllable-pitch propellers (CPPs), as was his practice on this arrival. He monitored the CPP pitch indicators on the starboard wing console and saw the pitch on both propellers start to reduce.
The reduction in pitch was also observed by the third officer at the centre console. The Master was satisfied that the transfer of pitch control to the wing had been successful, and he transferred control of the steering and bow thruster to the starboard wing console.
The ferry was now making about 10kt, and the Master set the port CPP to 0% and then to 70% astern. The Master did not look at the pitch indicators at this point because he was confident he had control at the starboard wing console. However, he soon noticed that the ferry’s speed was not reducing as quickly as he expected, so he set the starboard CPP to 0% pitch.
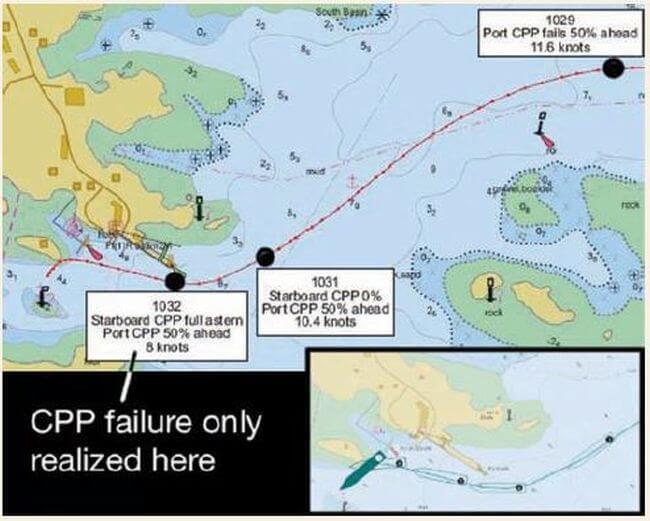
The Master initially thought that the ferry’s slow response to the pitch adjustments was due to the ferry’s trim. The OOW looked at the CPP indicators on the centre console and saw that the pitch on the port CPP was still at 50% ahead. He immediately advised the Master, who set both the port and starboard CPPs to 100% pitch astern. The starboard CPP pitch moved to 100% astern but the port CPP pitch remained at 50% ahead.
The ferry was now less than 200 metres off the pier breakwater, its bow starting to swing to starboard due to the twisting moment of the propellers. To counteract the swing, the Master set the bow thrusters to 100% thrust bow to port. At this point the Master decided against using the anchors to slow the vessel in view of the relatively high speed and the risk to the forward mooring party.
Meanwhile, the engine room was informed that the port CPP was ‘stuck ahead’. Engineers made various checks and one engineer went to place the port CPP into local control. With the ferry’s speed now about 8kt the swing to starboard had been stopped and the vessel was approximately 30 metres to the south of the pier and heading towards a set of small vessel mooring pontoons 70 metres ahead. At about this time, the port CPP pitch was set to zero using a local lever on the port shaft gearbox.
The vessel’s speed reduced to about 5kt and the ferry’s bow was swinging to port. As it did so, it ran over the outer mooring pontoons, causing some of the pontoons to overturn. Seconds later the ferry gently grounded and stopped in the water.
Some of the official report’s findings were:
- Pivotal to the mechanical failure was the lack of service instructions on board the vessel concerning the actuator’s inspection and maintenance for reference by the service personnel.
- The pitch control system had not been upgraded to incorporate a pitch deviation alarm and/or an automatic clutch-out capability as recommended by its manufacturer.
- It took the bridge team two minutes to realise that control of the port CPP had been lost. By then, the ferry was less than 200m from the pier roundhead and was still making 10kt.
- The ferry’s speed when approaching the port was too fast to stop the ferry in safe water.
Lessons learned
- For emergencies, practise, practise, practise. In this case, the ferry’s teams were not sufficiently prepared or practised to deal quickly and effectively with the loss of pitch control in the confined waters off this arrival port.
- Changing desired thrust on the motors, as when giving helm orders, has immediate and important consequences. Always confirm to see if your desired input is actually being applied.
- Even if you are confident of the manoeuvre and the ship’s capabilities, put in a safety factor that will work in your favour if things go awry. One of the easiest – slow down.
Press Release: nautinst.org
Do you have info to share with us ? Suggest a correction
- Real Life Incident: Vessel Collision in Good Visibility

- Real Life Incident: Severe Injury To Deck Crew While Leaving Berth
- Real Life Incident: Departure Damage in Very Restricted Waterway
- Real Life Incident: Low Situational Awareness Has High Impact Consequence
- Real Life Incident: Fouled Anchor in a Designated Anchorage
- Real Life Incident: Fire On Barge Carrying Scrap Metal Causes $7 Million Worth Of Damage






Latest Case studies Articles You Would Like:




Subscribe To Our Newsletters
By subscribing, you agree to our Privacy Policy and may receive occasional deal communications; you can unsubscribe anytime.
in this case we can use emergency stop for stucked cpp. and to continue with one engine!100% bow thruster+anchor+Full astern for engines.too much