

3 Phase Induction Motor – Construction and Working

The popularity of 3-phase induction motors onboard ships is due to their simple, robust construction and high reliability in the sea environment. An induction motor can be used for various speed and load requirements applications.
The ship’s generator’s 3-phase AC supply can be connected to the AC induction motor via a starter or any other arrangement, like an auto-transformer, to improve the torque and current characteristics.
Related Reading: Why Are Transformer And Alternator Ratings in kVA On Ships?
Induction motors are used in almost all ship machinery systems, such as crane motors, propulsion motors, blower motors, seawater pump motors, and even small synchronous motors.
What is an Induction Motor?
An induction motor or asynchronous motor is an AC motor in which the electric current in the rotor needed to produce torque is obtained by electromagnetic induction from the magnetic field of the stator winding.
There are two types of an induction motor:
1. Single Phase Induction Motor:
Single-phase induction motor: As the name suggests, this type of motor is supplied with a single-phase power supply. AC current is carried in the main winding of the motor. The type of single-phase induction motor used depends on the starting arrangement used as an auxiliary, as they are not self-starting.
Single-phase induction motors are primarily used in low-power applications, some of which are mentioned below:
- Small pumps
- Small portable compressors
- Small fans
- Drilling machines
2. 3 Phase Induction Motor
These 3 phase motor is supplied with 3 three-phase AC supply and is widely used in ships for heavier loads. 3 phase induction motors are of two types: squirrel cage and slip ring motors.
Squirrel cage motors are widely used on ships due to their rugged construction and simple design, few e.g. of their applications are:
- Lifts
- Cranes
- Large capacity exhaust fans
- Engine Auxiliary pumps
- Engine blower fan motor
- Engine room heavy load pumps –Ballast, Fire, Freshwater, Sea Water etc.
- Winch motor
- Windlass motor
Related Reading: General Overview Of Central Cooling System On Ships
Construction of 3 Phase Induction Motor
The main body of the Induction Motor comprises of two major parts:

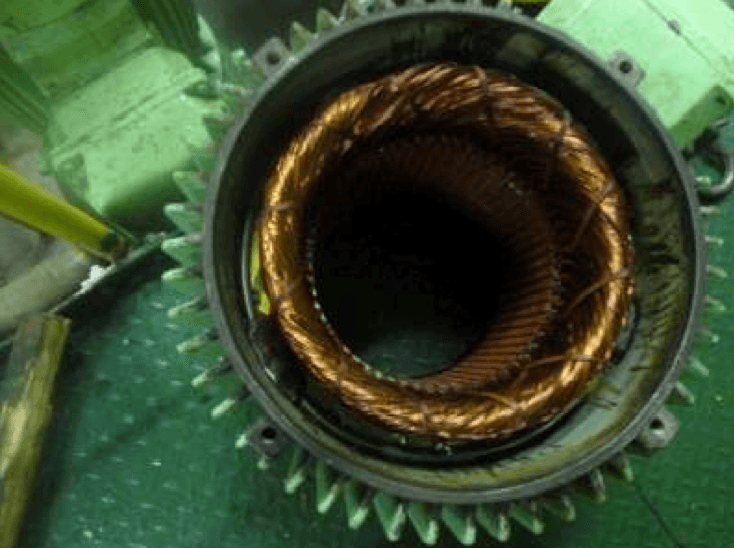
Stator
The stator is made up of a number of stampings in which different slots are cut to receive 3 phase winding circuit which is connected to 3 phase AC supply.

The three-phase windings are arranged in the slots so that they produce a rotating magnetic field after an AC supply is given to them.
Related Reading: How To Overhaul Motors On Ships?
Usually, windings are kept at different pitch circles with 30 % overlap with each other.
The windings are wound for a definite number of poles depending upon the speed requirement, as speed is inversely proportional to the number of poles, given by the formula:
Ns= 120f/p
Where Ns= synchronous speed
f = Frequency
p = no. of poles
Rotor
The rotor consists of a cylindrical laminated core with parallel slots that carry conductor bars.
Conductors are heavy copper or aluminium bars which fit in each slot. These conductors are brazed to the short-circuiting end rings.
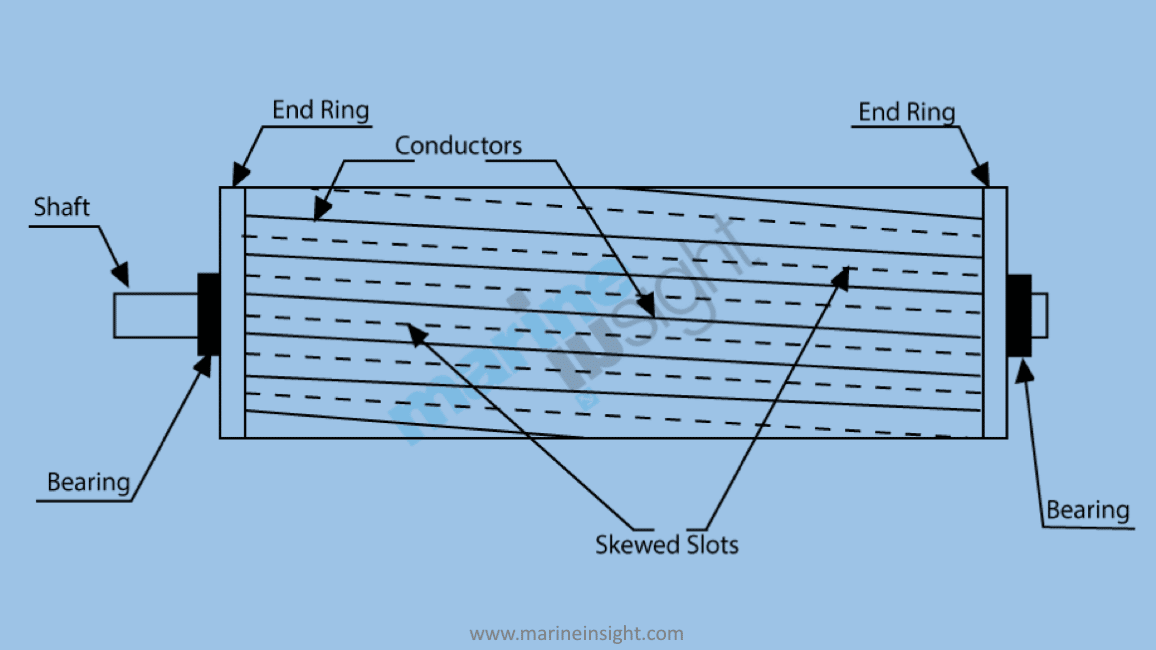
The slots are not precisely made parallel to the axis of the shaft but are slotted a little skewed for the following reasons:
- They reduce magnetic hum or noise
- They avoid stalling the motor

Principle and Working Of 3 Phase Induction Motor
When 3 phase supply is given to the motor, the resulting current generates a magnetic flux “Ø”.
Due to the switching sequence of 3 phase current in R, Y, and B, the generated flux rotates around the rotor conductor.
According to Faraday’s law, which states that –“an emf induced in any closed circuit is due to the rate of change of magnetic flux through the circuit”, Emf is induced in the Copper bar and due to this, current flows in the rotor.
The direction of the rotor can be given by Lenz law which states that – “the direction of induced current will be in the opposite of the motion causing it.”
Here, the relative velocity between the rotating flux and static rotor conductor causes current generation; hence, the rotor rotates in the same direction to reduce the cause, i.e., the relative velocity, thus rotating the induction motor’s rotor.
Advantages of Induction Motor
The motor construction and the way electric power is supplied give the induction motor several benefits, such as:
– They are robust and simple in construction, with very few moving parts
– They can efficiently operate in a rugged and harsh environment, such as in seagoing vessels
– The maintenance cost of 3-phase induction motor is less, and unlike that of a DC or synchro motor, they do not have parts like brushes, commuters, slip rings etc.
– An induction motor can operate in an intrinsic environment as they do not have brushes, which can cause the spark and can be dangerous to such an atmosphere
Related Reading: 20 Hazards Of Oil Tanker Ship Every Seafarer Must Know
– The 3-phase induction motors do not need any additional starting mechanism or arrangement as they can generate self-starting torque when a three-phase AC supply is provided to them, unlike synchronous motors. However, the single-phase induction motor needs some auxiliary arrangement for the starting torque
– The final output of a three-phase motor is nearly 1.5 times the rating (output) of a single-phase motor of the same size.
Disadvantages of 3 phase Induction motor:
– During starting, it draws high initial starting current when attached to a heavy load. This causes a dip in voltage during the starting period of the machine. Soft starting methods are connected to the 3 phase electric motor to avoid this problem.
Related Reading: Motor Starter Panel On Ships: Maintenance And Routines
– Induction motor operates at lagging power factor which results in increased I2R losses and efficiency reduction, especially at low load. To correct and improve the power factor, static capacitor banks can be used with this type of AC motor.
– Speed control of 3-phase induction motor is difficult as compared to DC motors. A variable frequency drive can be integrated with the induction motor for speed control.
Problems in 3 phase Induction motor:
Like any other machinery, a 3-phase induction motor can face various types of challenges, which can be broadly classified as:
A) Environmental-related faults: The harsh environment of the sea may take a toll on the ship’s machinery at an early stage if it is not maintained correctly. The ambient temperature and the moisture content in the sea air will affect the induction motor’s operational performance.
The motors are installed on other big machinery (main engine), and each has its own vibrating frequency, which affects the motor parts.
A wrong installation or loose foundation of the motor or the load it is connected to may also reduce the motor’s efficiency and, in the long run, cause its failure.
B) Electrical-related faults: Problems occur in the motor due to electrical supply faults such as the unbalanced supply of current or line voltage, earth fault in the system, single phasing, short circuit, etc. Different types of electrical faults are:
Winding Fault: The winding provided in the stator may fail due to the problem in the insulation caused leading to short circuit.
Related Reading: Importance Of Insulation Resistance In Marine Electrical Systems
Single Phasing Fault: When any one or more than one phase of the 3-phase supply is lost, a running 3-phase motor will continue to run but at elevated parameters of temperature and loss. This condition is known as single phasing.
Crawling: This is a mix of electrical and mechanical faults where the induction motor runs at a lower speed (nearly 1/7th of its synchronous speed) even at complete load application. It results from abnormal magnetomotive force or high harmonic content in the power supply to the motor.
C) Mechanical-related faults: The motor consists of several mechanical parts, and their alignment with each other and the load plays an essential role in motor efficiency. Some of the prominent mechanical-related motor faults are:
- Imbalance Rotor: The rotor is the only moving part in a 3-phase induction motor. If there is an imbalance between the shaft rotational axis and the weight distribution axis of the rotor, it will create vibration, additional heat and efficiency loss in the system.
The unbalance can be due to a defect in the rotor, internal misalignment, bending of the shaft, uneven loading, or problems in the motor and load coupling.
Related Reading: 10 Things To Consider While Reassembling Ship’s Machinery After Maintenance
- Fatigue Failure: If the maintenance schedule is improper or the parts used in the motor are of poor quality, material weakening may lead to fatigue failure, usually caused by repeatedly applied loads.
- Bearing failure: The motor is fitted with two bearings at each end of the rotor for supporting and freely rotating the shaft. The bearing can fail if timely maintenance is not done or due to overloading, wrong installation, contaminated lube oil, or operating at an excessive temperature.
Related Reading: How to Test Lubricating Oil On Board Ships?
- Corrosion: The surroundings of the motor installed in a ship are highly corrosive. As the motor consists of several mechanical parts like the rotor, bearing, etc., the moisture present in the atmosphere or the water present in the lubrication (grease) will corrode the bearings, motor shaft and rotors. The insulation can also be affected by the corrosion, and lead to a short circuit between the windings.
- Lubrication problem: Lack of lubrication or contamination of the lubricant can increase friction between parts, and bearings may wear out quickly.
Related Reading: 8 Ways to Optimise Lubricating Oil Usage On Ships
Protections for 3-phase induction motor
Single-phasing protection: To tackle this problem, protection devices are used for 3-phase induction motors. All motors above 500 KW are to be provided with protection devices or equipment to prevent damage due to single-phasing. The details of these devices can be found here.
Over-temperature: The motor’s winding can be heated due to problems like overloading or single phasing. Fuses, relays etc., are used to protect the motor from overheating.
Related Reading: Maintenance of Electrical Relay in Ships Electrical System
Soft Starting: As described above one of the disadvantages of 3 phase induction motor is the high current it draws during the starting period. To protect it from this problem, different starting method are used by integrating the motor with soft starter, DOL, Star delta starter, autotransformer etc.
Related Reading: 10 Ways To Achieve Energy Efficiency In Ship’s Electrical System
Using a soft starter for an induction motor reduces mechanical and electrical stresses, protecting the motor during the starting time.
You might also like to read:
- How to Minimize the Risks of an Electrical Shock on a Ship?
- 10 Ways to Achieve Energy Efficiency in Ships Electrical System
- Single Phasing in Electrical Motors: Causes, Effects, and Protection Methods
- Maintenance of Electrical Relay on Ships Electrical Circuit
- 10 Electrical Jobs Marine Engineers Must Know On Board Ships
Disclaimer: The views mentioned above are of the author only. Data and charts, if used, in the article have been sourced from available information and have not been authenticated by any statutory authority. The author and Marine Insight do not claim it to be accurate nor accept any responsibility for the same. The views constitute only the opinions and do not constitute any guidelines or recommendation on any course of action to be followed by the reader.
The article or images cannot be reproduced, copied, shared or used in any form without the permission of the author and Marine Insight.
Do you have info to share with us ? Suggest a correction

About Author
An ardent sailor and a techie, Anish Wankhede has voyaged on a number of ships as a marine engineer officer. He loves multitasking, networking, and troubleshooting. He is the one behind the unique creativity and aesthetics at Marine Insight.
Subscribe To Our Newsletters
By subscribing, you agree to our Privacy Policy and may receive occasional deal communications; you can unsubscribe anytime.
very nice bt construction of indnuction motor is not sufficient
Hello Anish,
you have explained about working of a three phase induction motor very well, but yes you should have explained the construction more briefly. You have just described a general construction of three phase motor. But rotor of a three phase induction motor is designed in basic two types, viz: Squirrel cage rotor and phase wound rotor. The Construction of a three phase motor is explained briefly at the link.
Basic and important theory information for the beginners.
nice
3 phase I.m has brief explain
What are the safeties of motors
Very useful
Moje job milegi
Thanks this artical is very usefull for us ..
Keep it up
r/sir i would like to know, how a asynchronous motor work as alternator/generator
Very useful for my careers
Thxs for good information articles
नमस्कार.
ही महिती मराठी मधे पाठवा.
सर्व मराठी माध्यम विध्यार्थ्याना समजेल.
धन्यवाद.🙏